C51¶
概述¶
C51 最初是在 A Distributional Perspective on Reinforcement Learning 中提出的,与以往的研究不同,C51 评估了 q 值的完整分布,而不仅仅是期望值。作者设计了一个分布式 Bellman 算子,它保留了值分布中的多峰性,被认为能够实现更稳定的学习,并减轻从非稳态策略学习的负面影响。
核心要点¶
C51 是一种 无模型(model-free) 和 基于值(value-based) 的强化学习算法。
C51 仅 支持离散动作空间 。
C51 是一种 异策略(off-policy) 算法。
通常, C51 使用 eps-greedy 或 多项式采样 进行探索。
C51 可以与循环神经网络 (RNN) 结合使用。
伪代码¶
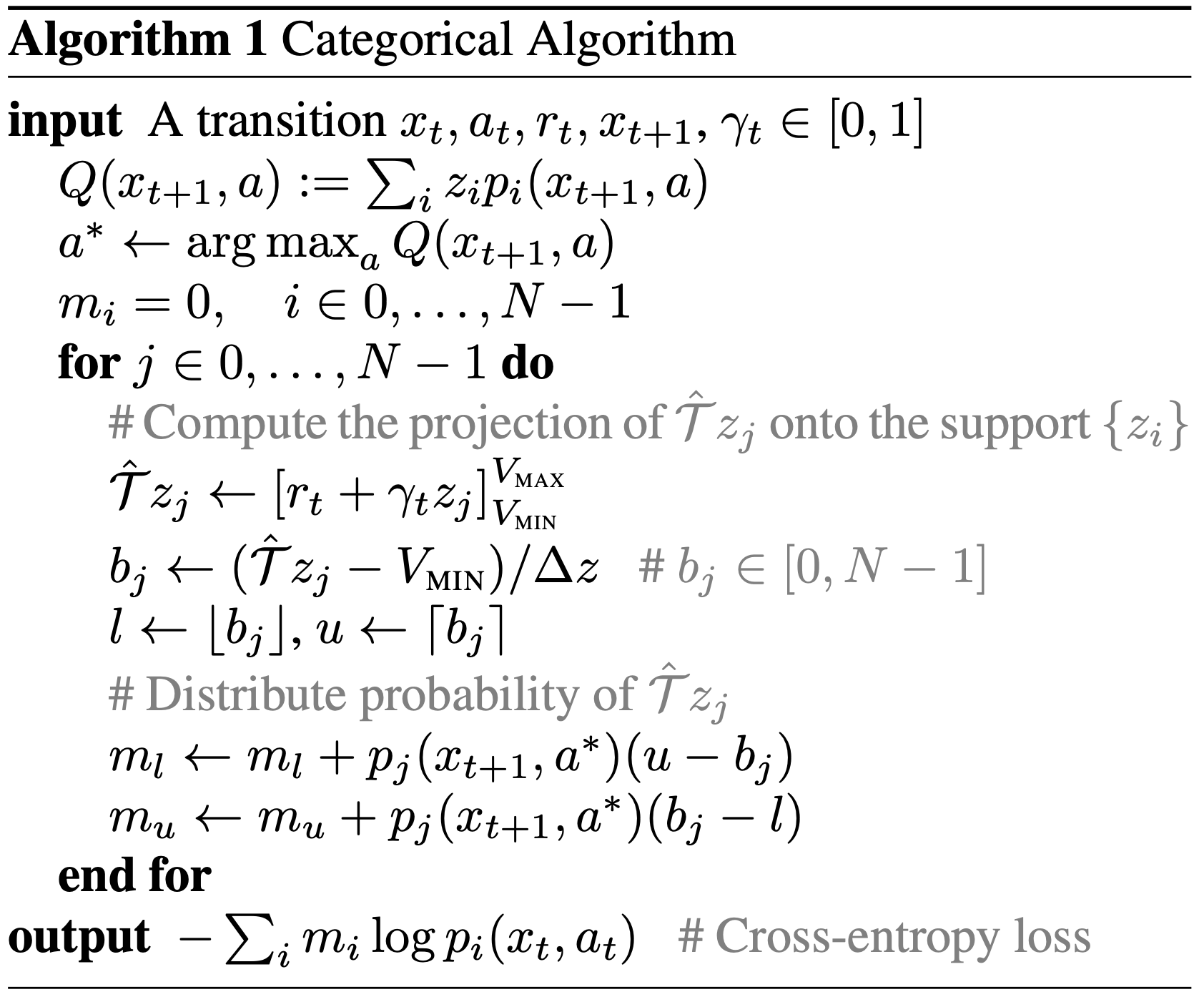
注意
C51 使用离散分布来建模值分布,其支持集合为N个原子: \(z_i = V_\min + i * delta, i = 0,1,...,N-1\) 和 \(delta = (V_\max - V_\min) / N\) 。每个原子 \(z_i\) 都有一个参数化的概率 \(p_i\) 。C51 的贝尔曼更新将 \(r + \gamma * z_j^{\left(t+1\right)}\) 的分布投影到分布 \(z_i^t\) 上。
关键方程或关键框图¶
C51 的贝尔曼方程的目标是通过将返回分布 \(r + \gamma * z_j\) 投影到当前分布 \(z_i\) 上来得到的. 给定一个采样出来的状态转移 \((x, a, r, x')\),我们为每个原子 \(z_j\) 计算贝尔曼更新 \(Tˆz_j := r + \gamma z_j\) ,然后将其概率 \(p_{j}(x', \pi(x'))\) 分配给其相邻的原子 \(p_{i}(x, \pi(x))\):
扩展¶
- C51 可以和以下模块结合:
优先经验回放 (Prioritized Experience Replay)
多步时序差分 (TD) 损失
双目标网络 (Double Target Network)
决斗头
循环神经网络 (RNN)
实现¶
提示
我们的 C51 基准结果使用了与 DQN 相同的超参数,(除 n_atom 这个 C51 特有的参数以外),这也是配置 C51 的通用方法。
C51 的默认配置如下:
- class ding.policy.c51.C51Policy(cfg: EasyDict, model: Module | None = None, enable_field: List[str] | None = None)[source]
- Overview:
C51算法的策略类。
- Config:
ID
符号
类型
默认值
描述
其他(形状)
1
type字符串
c51
RL policy register name, refer toregistryPOLICY_REGISTRYthis arg is optional,a placeholder2
cuda布尔
假
Whether to use cuda for networkthis arg can be diff-erent from modes3
on_policy布尔
假
Whether the RL algorithm is on-policyor off-policy4
priority布尔
假
Whether use priority(PER)priority sample,update priority5
model.v_min浮点数
-10
Value of the smallest atomin the support set.6
model.v_max浮点数
10
Value of the largest atomin the support set.7
model.n_atom整数
51
Number of atoms in the support setof the value distribution.8
other.eps.start浮点数
0.95
Start value for epsilon decay.9
other.eps.end浮点数
0.1
End value for epsilon decay.10
discount_factor浮点数
0.97, [0.95, 0.999]
Reward’s future discount factor, aka.gammamay be 1 when sparsereward env11
nstep整数
1,
N-step reward discount sum for targetq_value estimation12
learn.updateper_collect整数
3
How many updates(iterations) to trainafter collector’s one collection. Onlyvalid in serial trainingthis args can be varyfrom envs. Bigger valmeans more off-policy
C51 使用的网络接口定义如下:
- class ding.model.template.q_learning.C51DQN(obs_shape: int | SequenceType, action_shape: int | SequenceType, encoder_hidden_size_list: SequenceType = [128, 128, 64], head_hidden_size: int | None = None, head_layer_num: int = 1, activation: Module | None = ReLU(), norm_type: str | None = None, v_min: float | None = -10, v_max: float | None = 10, n_atom: int | None = 51)[source]
- Overview:
C51DQN的神经网络结构和计算图,结合了分布强化学习和DQN。您可以参考https://arxiv.org/pdf/1707.06887.pdf了解更多详情。C51DQN由
encoder和head组成。encoder用于提取观察的特征,head用于计算Q值的分布。- Interfaces:
__init__,forward
注意
当前的C51DQN支持两种类型的编码器:
FCEncoder和ConvEncoder。- forward(x: Tensor) Dict[来源]
- Overview:
C51DQN 前向计算图,输入观测张量以预测 q_value 及其分布。
- Arguments:
x (
torch.Tensor): 输入的观测张量数据。
- Returns:
输出 (
Dict): DQN前向的输出,包括q_value和分布。
- ReturnsKeys:
logit (
torch.Tensor): 每个可能动作维度的离散Q值输出。分布 (
torch.Tensor): Q值离散化分布,即每个均匀间隔的原子Q值的概率,例如将[-10, 10]分成51个均匀间隔。
- Shapes:
x (
torch.Tensor): \((B, N)\), 其中 B 是批量大小,N 是 head_hidden_size。logit (
torch.Tensor): \((B, M)\), 其中 M 是动作形状。分布(
torch.Tensor): \((B, M, P)\), 其中 P 是 n_atom。
- Examples:
>>> model = C51DQN(128, 64) # arguments: 'obs_shape' and 'action_shape' >>> inputs = torch.randn(4, 128) >>> outputs = model(inputs) >>> assert isinstance(outputs, dict) >>> # default head_hidden_size: int = 64, >>> assert outputs['logit'].shape == torch.Size([4, 64]) >>> # default n_atom: int = 51 >>> assert outputs['distribution'].shape == torch.Size([4, 64, 51])
注意
为了保持一致性和兼容性,我们将与动作选择相关的网络所有输出命名为
logit。注意
为了方便起见,我们建议原子的数量应为奇数,这样中间原子的值正好是Q值。
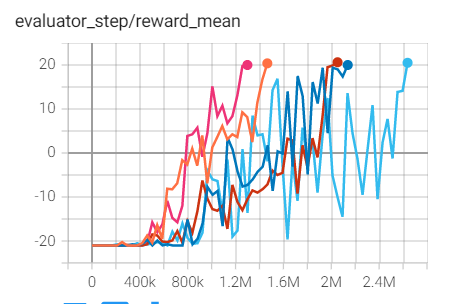
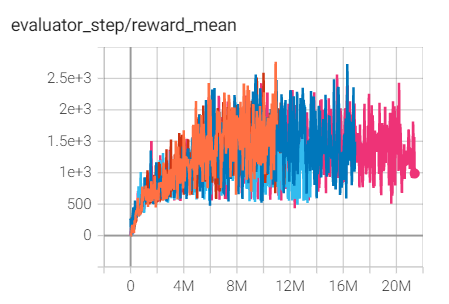
基准测试¶
环境 |
最佳平均奖励 |
评估结果 |
配置链接 |
比较 |
|---|---|---|---|---|
Pong
(PongNoFrameskip-v4)
|
20.6 |
|
Tianshou(20)
|
|
Qbert
(QbertNoFrameskip-v4)
|
20006 |

|
Tianshou(16245)
|
|
SpaceInvaders
(SpaceInvadersNoFrame skip-v4)
|
2766 |
|
Tianshou(988.5)
|
附注:
上述结果是在五个不同的随机种子(0、1、2、3、4)上运行相同配置的实验得出的。
对于像 DQN 这样的离散动作空间算法,通常使用 Atari 环境集进行测试(包括子环境 Pong ),而 Atari 环境通常通过训练10M个环境步骤的最高平均奖励来评估。关于 Atari 的更多细节,请参考 Atari Env Tutorial 。