D4PG¶
概述¶
D4PG,在论文分布式分布确定性策略梯度中提出,是一种基于演员-评论家的无模型策略梯度算法,它扩展了DDPG。与DDPG相比,改进包括使用N步回报、优先经验回放和分布价值函数。此外,训练通过多个分布式工作器并行进行,所有工作器都写入同一个回放表。作者发现,这些简单的修改有助于算法的整体性能,其中N步回报带来了最大的性能提升,而优先缓冲的重要性相对较小。
快速事实¶
D4PG仅用于具有连续动作空间的环境。(例如MuJoCo)
D4PG 是一种 离策略 算法。
D4PG 使用了一个分布式的评论家。
D4PG 是一种无模型和演员-评论家强化学习算法,分别优化演员网络和评论家网络。
通常,D4PG使用Ornstein-Uhlenbeck过程或高斯过程(在我们的实现中默认)进行探索。
关键方程或关键图表¶
D4PG算法维护一个分布评论家\(Z_\pi(s, a)\),它将预期的Q值估计为一个随机变量,使得\(Q(s, a)=\mathbb{E}Z_\pi(s, a)\)。\(Z\)通常是Q的51个支撑点的分类分布。
因此,分布贝尔曼算子可以定义为:
该操作符的分布变体接受从状态-动作对映射到分布的函数,并返回相同形式的函数。 用于学习评论者分布参数的损失定义为\(L(\pi) = \mathbb{E}[d(\mathcal{T}_{\pi_{\theta'}}, Z_{w'}(s, a), Z_{w}(s, a)]\) 对于某些度量\(d\),它测量两个分布之间的距离。
最后,通过考虑动作值分布的期望来完成演员更新:
在计算TD误差时,D4PG计算TD目标中的N步以包含更多未来步骤的奖励:
D4PG 从优先回放缓冲区中以非均匀概率 \(p_i\) 进行采样。 这需要使用重要性采样,通过将评论家更新加权一个因子 \(R_{p_i}^{-1}\) 来实现。
注意
D4PG 利用多个并行独立演员,收集经验并将数据输入到同一个回放缓冲区。 然而,我们的实现仅使用单个演员。
伪代码¶
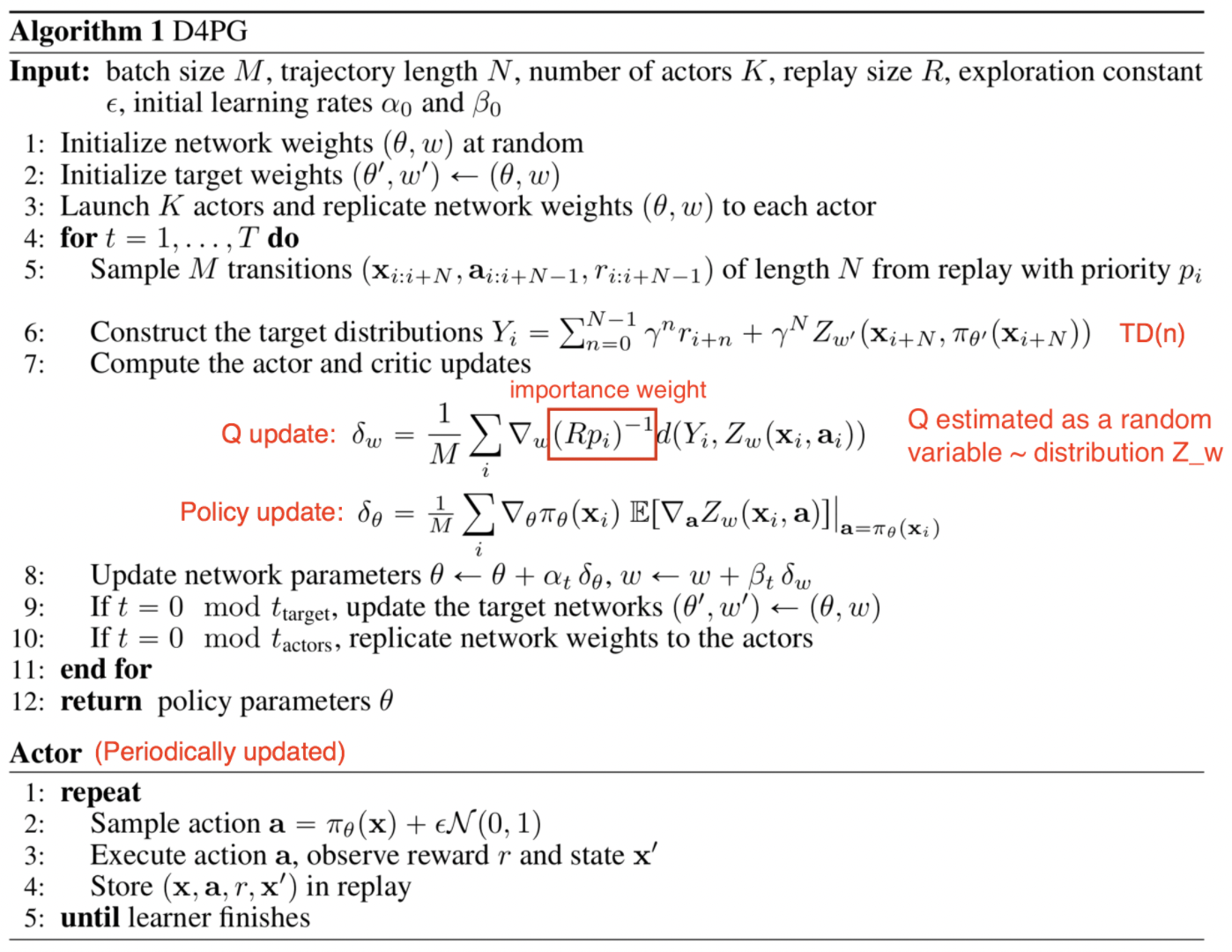
来源: https://lilianweng.github.io/posts/2018-04-08-policy-gradient/#d4pg¶
实现¶
默认配置定义如下:
- class ding.policy.d4pg.D4PGPolicy(cfg: EasyDict, model: Module | None = None, enable_field: List[str] | None = None)[来源]
- Overview:
D4PG算法的策略类。D4PG是DDPG的一个变体,它使用分布式的评论家。分布式评论家通过使用分位数回归来实现。论文链接:https://arxiv.org/abs/1804.08617。
- Property:
学习模式, 收集模式, 评估模式
- Config:
ID
符号
类型
默认值
描述
其他(形状)
1
type字符串
d4pg
RL policy register name, referto registryPOLICY_REGISTRYthis arg is optional,a placeholder2
cuda布尔
真
Whether to use cuda for network3
random_collect_size整数
25000
Number of randomly collectedtraining samples in replaybuffer when training starts.Default to 25000 forDDPG/TD3, 10000 forsac.5
learn.learning_rate_actor浮点数
1e-3
Learning rate for actornetwork(aka. policy).6
learn.learning_rate_critic浮点数
1e-3
Learning rates for criticnetwork (aka. Q-network).7
learn.actor_update_freq整数
1
When critic network updatesonce, how many times will actornetwork update.Default 18
learn.noise布尔
假
Whether to add noise on targetnetwork’s action.Default False forD4PG.Target Policy Smoo-thing Regularizationin TD3 paper.9
learn.-ignore_done布尔
假
Determine whether to ignoredone flag.Use ignore_done onlyin halfcheetah env.10
learn.-target_theta浮点数
0.005
Used for soft update of thetarget network.aka. Interpolationfactor in polyak averaging for targetnetworks.11
collect.-noise_sigma浮点数
0.1
Used for add noise during co-llection, through controllingthe sigma of distributionSample noise from distribution, Gaussianprocess.12
model.v_min浮点数
-10
Value of the smallest atomin the support set.13
model.v_max浮点数
10
Value of the largest atomin the support set.14
model.n_atom整数
51
Number of atoms in the supportset of the value distribution.15
nstep整数
3, [1, 5]
N-step reward discount sum fortarget q_value estimation16
priority布尔
真
Whether use priority(PER)priority sample,update priority
模型¶
这里我们提供了QACDIST模型作为D4PG的默认模型的示例。
- class ding.model.template.qac_dist.QACDIST(obs_shape: int | SequenceType, action_shape: int | SequenceType, action_space: str = 'regression', critic_head_type: str = 'categorical', actor_head_hidden_size: int = 64, actor_head_layer_num: int = 1, critic_head_hidden_size: int = 64, critic_head_layer_num: int = 1, activation: Module | None = ReLU(), norm_type: str | None = None, v_min: float | None = -10, v_max: float | None = 10, n_atom: int | None = 51)[源代码]
- Overview:
具有分布Q值的QAC模型。
- Interfaces:
__init__,forward,compute_actor,compute_critic
- compute_actor(inputs: Tensor) Dict[source]
- Overview:
使用编码的嵌入张量来预测输出。 使用
'compute_actor'模式执行参数更新 使用编码的嵌入张量来预测输出。- Arguments:
- inputs (
torch.Tensor): 编码后的嵌入张量,由给定的
hidden_size决定,即(B, N=hidden_size)。hidden_size = actor_head_hidden_size
- inputs (
模式 (
str): 前向模式的名称。
- Returns:
输出 (
Dict): 前向传递编码器和头部的输出。
- ReturnsKeys (either):
动作 (
torch.Tensor): 与action_shape大小相同的连续动作张量。- logit (
torch.Tensor): Logit 张量编码
mu和sigma,两者的大小与输入x相同。
- logit (
- Shapes:
输入 (
torch.Tensor): \((B, N0)\), B 是批量大小,N0 对应于hidden_size动作 (
torch.Tensor): \((B, N0)\)logit (
list): 2个元素,mu和sigma,每个的形状为\((B, N0)\)。q_value (
torch.FloatTensor): \((B, )\), B 是批量大小。
- Examples:
>>> # Regression mode >>> model = QACDIST(64, 64, 'regression') >>> inputs = torch.randn(4, 64) >>> actor_outputs = model(inputs,'compute_actor') >>> assert actor_outputs['action'].shape == torch.Size([4, 64]) >>> # Reparameterization Mode >>> model = QACDIST(64, 64, 'reparameterization') >>> inputs = torch.randn(4, 64) >>> actor_outputs = model(inputs,'compute_actor') >>> actor_outputs['logit'][0].shape # mu >>> torch.Size([4, 64]) >>> actor_outputs['logit'][1].shape # sigma >>> torch.Size([4, 64])
- compute_critic(inputs: Dict) Dict[来源]
- Overview:
使用
'compute_critic'模式执行参数更新 使用编码的嵌入张量来预测输出。- Arguments:
obs,action编码的张量。模式 (
str): 前向模式的名称。
- Returns:
输出 (
Dict): Q值输出和分布。
- ReturnKeys:
q_value (
torch.Tensor): Q值张量,大小与批量大小相同。分布 (
torch.Tensor): Q值分布张量。
- Shapes:
obs (
torch.Tensor): \((B, N1)\), 其中 B 是批量大小,N1 是obs_shape动作 (
torch.Tensor): \((B, N2)\), 其中 B 是批量大小,N2 是``action_shape``q_value (
torch.FloatTensor): \((B, N2)\), 其中 B 是批量大小,N2 是action_shape分布 (
torch.FloatTensor): \((B, 1, N3)\), 其中 B 是批量大小,N3 是num_atom
- Examples:
>>> # Categorical mode >>> inputs = {'obs': torch.randn(4,N), 'action': torch.randn(4,1)} >>> model = QACDIST(obs_shape=(N, ),action_shape=1,action_space='regression', ... critic_head_type='categorical', n_atoms=51) >>> q_value = model(inputs, mode='compute_critic') # q value >>> assert q_value['q_value'].shape == torch.Size([4, 1]) >>> assert q_value['distribution'].shape == torch.Size([4, 1, 51])
- forward(inputs: Tensor | Dict, mode: str) Dict[来源]
- Overview:
使用观察和动作张量来预测输出。 参数更新使用QACDIST的MLPs前向设置。
- Arguments:
- Forward with
'compute_actor': - inputs (
torch.Tensor): 编码的嵌入张量,由给定的
hidden_size决定,即(B, N=hidden_size)。 是actor_head_hidden_size还是critic_head_hidden_size取决于mode。
- inputs (
- Forward with
'compute_critic', inputs (Dict) Necessary Keys: obs,action编码的张量。
模式 (
str): 前向模式的名称。
- Forward with
- Returns:
输出 (
Dict): 网络前向的输出。- Forward with
'compute_actor', Necessary Keys (either): 动作 (
torch.Tensor): 与输入x大小相同的动作张量。- logit (
torch.Tensor): Logit 张量编码
mu和sigma,两者的大小与输入x相同。
- logit (
- Forward with
'compute_critic', Necessary Keys: q_value (
torch.Tensor): Q值张量,大小与批量大小相同。分布 (
torch.Tensor): Q值分布张量。
- Forward with
- Actor Shapes:
输入 (
torch.Tensor): \((B, N0)\), B 是批量大小,N0 对应于hidden_size动作 (
torch.Tensor): \((B, N0)\)q_value (
torch.FloatTensor): \((B, )\), 其中 B 是批量大小。
- Critic Shapes:
obs (
torch.Tensor): \((B, N1)\), 其中 B 是批量大小,N1 是obs_shape动作 (
torch.Tensor): \((B, N2)\), 其中 B 是批量大小,N2 是``action_shape``q_value (
torch.FloatTensor): \((B, N2)\), 其中 B 是批量大小,N2 是action_shape分布 (
torch.FloatTensor): \((B, 1, N3)\), 其中 B 是批量大小,N3 是num_atom
- Actor Examples:
>>> # Regression mode >>> model = QACDIST(64, 64, 'regression') >>> inputs = torch.randn(4, 64) >>> actor_outputs = model(inputs,'compute_actor') >>> assert actor_outputs['action'].shape == torch.Size([4, 64]) >>> # Reparameterization Mode >>> model = QACDIST(64, 64, 'reparameterization') >>> inputs = torch.randn(4, 64) >>> actor_outputs = model(inputs,'compute_actor') >>> actor_outputs['logit'][0].shape # mu >>> torch.Size([4, 64]) >>> actor_outputs['logit'][1].shape # sigma >>> torch.Size([4, 64])
- Critic Examples:
>>> # Categorical mode >>> inputs = {'obs': torch.randn(4,N), 'action': torch.randn(4,1)} >>> model = QACDIST(obs_shape=(N, ),action_shape=1,action_space='regression', ... critic_head_type='categorical', n_atoms=51) >>> q_value = model(inputs, mode='compute_critic') # q value >>> assert q_value['q_value'].shape == torch.Size([4, 1]) >>> assert q_value['distribution'].shape == torch.Size([4, 1, 51])
基准测试¶
环境 |
最佳平均奖励 |
评估结果 |
配置链接 |
比较 |
|---|---|---|---|---|
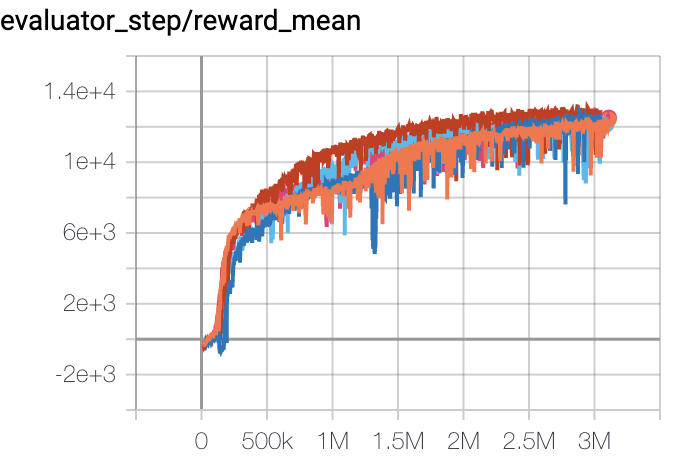
猎豹 (Halfcheetah-v3) |
13000 |
|
||
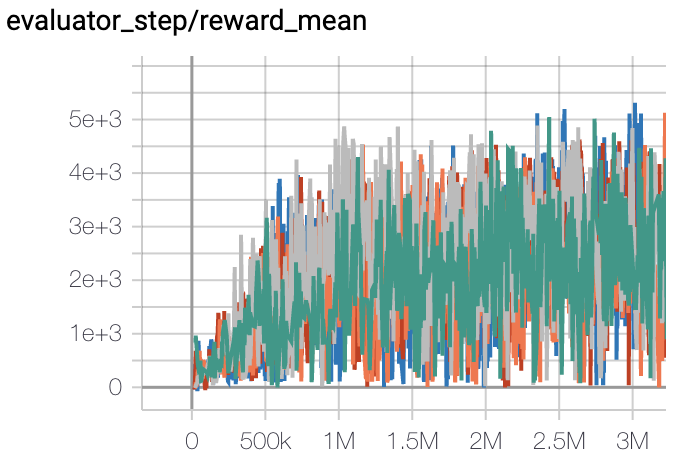
Walker2d (Walker2d-v2) |
5300 |
|
||
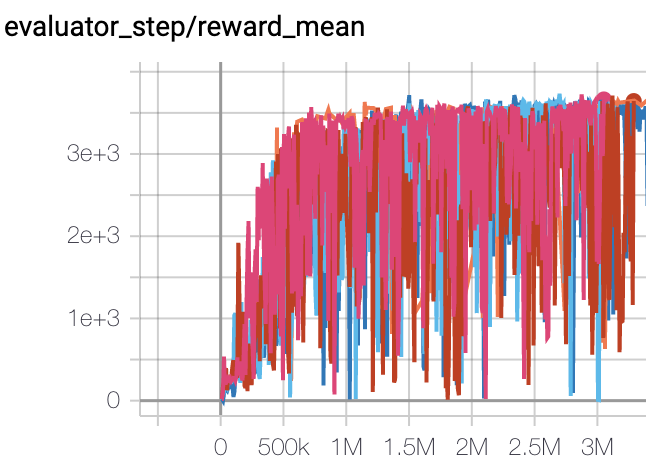
霍珀 (Hopper-v2) |
3500 |
|
其他公共实现¶
参考文献¶
Gabriel Barth-Maron, Matthew W. Hoffman, David Budden, Will Dabney, Dan Horgan, Dhruva TB, Alistair Muldal, Nicolas Heess, Timothy Lillicrap: “分布式分布确定性策略梯度”, 2018; [https://arxiv.org/abs/1804.08617v1 arXiv:1804.08617v1].