扩散器(平面扩散器)¶
概述¶
在强化学习领域,如果我们有一个包含各种轨迹的数据集\(T\),强化学习的目标是从\(T\)中挖掘并构建一个高性能的代理,希望它可以直接部署到环境中并取得良好的回报。从无模型离线强化学习的角度来看,工作的核心集中在如何更准确地估计每个可能的状态-动作对的\(Q\)值,特别是那些可能查询分布外状态-动作对的情况。从基于模型的离线强化学习的角度来看,目标通常变成如何更好地用这批数据拟合真实环境的动态模型,然后在这个收敛的环境模型上实施在线强化学习算法。在这两种算法完成后,我们通常会得到一个显式或隐式的策略,该策略可以在给定任何环境状态的情况下返回与环境交互的动作。
上述方法通常没有利用轨迹在\(T\)中的连续性,而是将每条轨迹划分为几个状态转换段,并将每个这样的段视为后续训练的独立样本点。然而,我们可以从一个全新的角度来看待这个数据集\(T\),将整个轨迹视为一个样本点,从而将我们的目标改变为对整个轨迹的分布进行建模。最终,我们可以从分布中采样轨迹,以轨迹最优性作为条件变量。
近年来,扩散模型在生成领域表现出色。与其他生成模型(如VAE和GAN)相比,扩散模型在建模复杂分布方面具有更强的能力。因此,研究人员考虑尝试使用扩散模型来建模 \(T\)中的轨迹分布。扩散,如研究Planning with Diffusion for Flexible Behavior Synthesis中所提出的,代表了一种使用扩散模型生成轨迹的研究方法。
快速事实¶
扩散视图将离线决策视为一个序列模型问题。
扩散使用扩散模型生成轨迹
关键方程或关键图表¶
在扩散过程中,轨迹在数组中按以下方式连接:
关于轨迹中每次转换之间的时间依赖性,Diffusion 并不强调自回归或马尔可夫性质,而是对时间局部性做出了更为宽松的假设。Diffusion 通过迭代去噪状态-动作对来采样计划中的轨迹,这些状态-动作对具有可变的量。 在单个去噪步骤中,较小的感受野限制了模型基于轨迹中的相邻帧推断去噪结果。
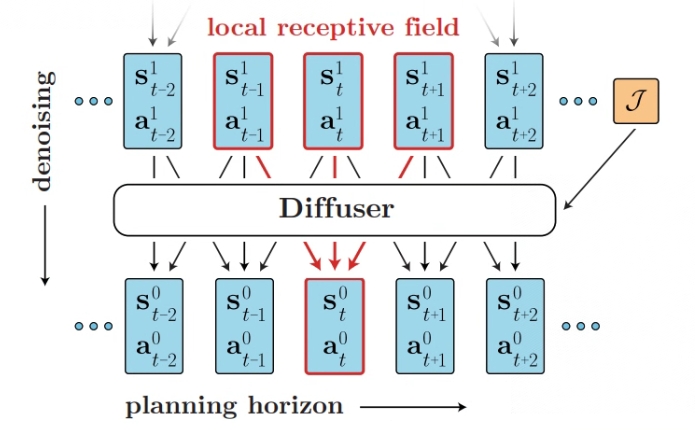
原始论文使用了一个由重复的(时间)卷积残差块组成的模型来满足这些标准。最终结构主要借鉴了图像扩散模型中常用的U-Nets,但将二维空间卷积替换为一维时间卷积。 该模型的损失函数为:
该算法将强化学习问题转化为条件采样问题。它利用一个引导函数来评估每个样本轨迹在每一个时间步t的值。最终,算法选择最佳轨迹作为其输出。最佳轨迹如下:
实现¶
默认配置定义如下:
- class ding.policy.plan_diffuser.PDPolicy(cfg: EasyDict, model: Module | None = None, enable_field: List[str] | None = None)[source]
- Overview:
使用的网络接口扩散定义如下:
- class ding.model.template.diffusion.GaussianDiffusion(model: str, model_cfg: dict, horizon: int, obs_dim: int | SequenceType, action_dim: int | SequenceType, n_timesteps: int = 1000, predict_epsilon: bool = True, loss_discount: float = 1.0, clip_denoised: bool = False, action_weight: float = 1.0, loss_weights: dict | None = None)[来源]
- Overview:
高斯扩散模型
- Arguments:
模型 (
str): 模型的类型model_cfg (:obj:’dict’) 模型的配置
horizon (
int): 轨迹的horizonobs_dim (
int): 观测的维度action_dim (
int): 动作的维度n_timesteps (
int): 时间步数predict_epsilon (:obj:’bool’): 是否预测epsilon
loss_discount (:obj:’float’): 损失折扣
clip_denoised (:obj:’bool’): 是否使用 clip_denoised
action_weight (:obj:’float’): 动作的权重
loss_weights (:obj:’dict’): 损失权重
- forward(cond, *args, **kwargs)[source]
定义每次调用时执行的计算。
应该由所有子类覆盖。
注意
尽管前向传递的配方需要在此函数内定义,但之后应该调用
Module实例而不是这个,因为前者负责运行已注册的钩子,而后者则默默地忽略它们。
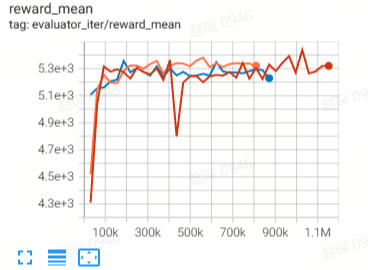
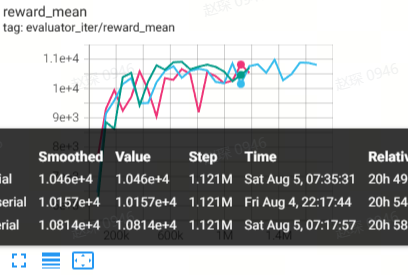
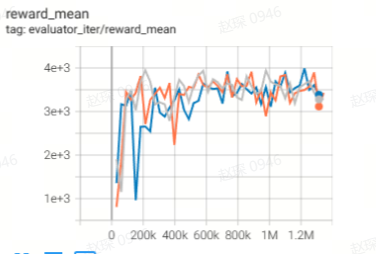
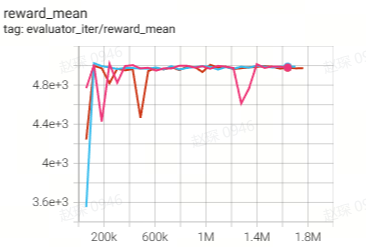
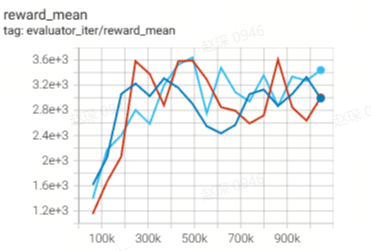
基准测试¶
环境 |
奖励均值 |
评估结果 |
配置链接 |
比较 |
|---|---|---|---|---|
Halfcheetah
(Halfcheetah-medium-v2)
|
44.9 |
|
42.8 |
|
Halfcheetah
(Halfcheetah-medium-expert-v2)
|
86.6 |
|
88.9 |
|
Walker2d
(Walker2d-medium-v2)
|
71 |
|
79.6 |
|
Walker2d
(Walker2d-medium-expert-v2)
|
108.5 |
|
106.9 |
|
Hopper
(Hopper-medium-v2)
|
58.1 |

|
74.3 |
|
Hopper
(Hopper-medium-expert-v2)
|
97.2 |
|
103.3 |
参考文献¶
迈克尔·詹纳、伊伦·杜、约书亚·B·特南鲍姆、谢尔盖·莱文 使用扩散进行灵活行为合成的规划 https://arxiv.org/pdf/2205.09991