SAC¶
概述¶
软演员-评论家(SAC)是一种稳定且高效的无模型离策略最大熵演员-评论家算法,适用于连续状态和动作空间,该算法在2018年的论文软演员-评论家:具有随机演员的离策略最大熵深度强化学习中提出。策略的增强熵目标带来了许多概念和实践上的优势,包括更强大的探索能力和策略捕捉接近最优行为的多种模式的能力。作者还展示了这种方法通过将离策略更新与稳定的随机演员-评论家公式相结合,在一系列连续控制基准任务上实现了最先进的性能,优于之前的在策略和离策略方法。
快速事实¶
SAC 是为具有连续动作空间的环境实现的。(例如 MuJoCo、Pendulum 和 LunarLander)
SAC 是一种 离策略 和 无模型 的算法,结合非空回放缓冲区进行策略探索。
SAC是一种actor-critic强化学习算法,它分别优化了actor网络和critic网络,
SAC 也适用于多连续动作空间。
关键方程或关键图表¶
SAC考虑了一个更一般的最大熵目标,通过增加策略的期望熵来增强目标,从而倾向于随机策略:
温度参数 \(\alpha > 0\) 控制最优策略的随机性。
Soft Actor-Critic: Off-Policy Maximum Entropy Deep Reinforcement Learning with a Stochastic Actor 考虑了一个参数化的状态值函数、软Q函数和一个易于处理的策略。 具体来说,值函数和软Q函数被建模为表达性神经网络,而策略则被建模为由神经网络给出的均值和协方差的高斯分布。 特别是,SAC应用了重参数化技巧,而不是直接最小化策略参数的期望KL散度,如下所示:
我们通过配置learn.reparameterization来实现重参数化技巧。
注意
与原始版本建模状态值函数和软Q函数相比,我们的实现包含两个版本。一个是建模状态值函数和软Q函数,另一个是通过双网络仅建模软Q函数。
注意
Soft Actor-Critic: Off-Policy Maximum Entropy Deep Reinforcement Learning with a Stochastic Actor 考虑了一个参数化的状态值函数、软Q函数和一个可处理的策略。
我们的实现包含两个版本。一个是建模状态值函数和软Q函数,另一个是通过双网络仅建模软Q函数。
我们配置 model.value_network, model.twin_q, 和 learn.learning_rate_value 来切换实现版本。
伪代码¶
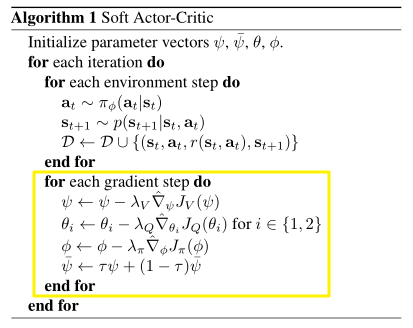
注意
与原始版本相比,我们在第二个实现版本中仅优化了q网络和actor网络。
扩展¶
SAC 可以与以下内容结合使用:
自动阿尔法策略
Reinforcement Learning with Deep Energy-Based Policies 提出了熵系数 \(\alpha\) 用于确定熵和奖励的相对重要性。 Soft Actor-Critic: Off-Policy Maximum Entropy Deep Reinforcement Learning with a Stochastic Actor 进行的广泛实验表明,软演员-评论家对奖励缩放敏感,因为它与最优策略的温度有关。最优奖励缩放因环境而异,应针对每个任务单独调整。 由于我们通过配置
learn.is_auto_alpha和learn.alpha实现了基于最大熵的自动 alpha 策略。
实现¶
默认配置定义如下:
- class ding.policy.sac.SACPolicy(cfg: EasyDict, model: Module | None = None, enable_field: List[str] | None = None)[source]¶
- Overview:
连续SAC算法的策略类。论文链接:https://arxiv.org/pdf/1801.01290.pdf
- Config:
ID
符号
类型
默认值
描述
其他
1
type字符串
sac
RL policy register name, referto registryPOLICY_REGISTRYthis arg is optional,a placeholder2
cuda布尔
真
Whether to use cuda for network3
on_policy布尔
假
SAC is an off-policyalgorithm.4
priority布尔
假
Whether to use prioritysampling in buffer.5
priority_IS_weight布尔
假
Whether use Importance Samplingweight to correct biased update6
random_collect_size整数
10000
Number of randomly collectedtraining samples in replaybuffer when training starts.Default to 10000 forSAC, 25000 for DDPG/TD3.7
learn.learning_rate_q浮点数
3e-4
Learning rate for soft qnetwork.Defalut to 1e-38
learn.learning_rate_policy浮点数
3e-4
Learning rate for policynetwork.Defalut to 1e-39
learn.alpha浮点数
0.2
Entropy regularizationcoefficient.alpha is initiali-zation for autoalpha, whenauto_alpha is True10
learn.auto_alpha布尔
假
Determine whether to useauto temperature parameteralpha.Temperature parameterdetermines therelative importanceof the entropy termagainst the reward.11
learn.-ignore_done布尔
假
Determine whether to ignoredone flag.Use ignore_done onlyin env like Pendulum12
learn.-target_theta浮点数
0.005
Used for soft update of thetarget network.aka. Interpolationfactor in polyak averaging for targetnetworks.
我们以第二个版本的实现(仅预测软Q函数)为例来介绍SAC算法:
基本演员-评论家定义
初始化模型。
# build network
self._policy_net = PolicyNet(self._obs_shape, self._act_shape, self._policy_embedding_size)
self._twin_q = twin_q
if not self._twin_q:
self._soft_q_net = SoftQNet(self._obs_shape, self._act_shape, self._soft_q_embedding_size)
else:
self._soft_q_net = nn.ModuleList()
for i in range(2):
self._soft_q_net.append(SoftQNet(self._obs_shape, self._act_shape, self._soft_q_embedding_size))
来自软Q网络的软Q预测
def compute_critic_q(self, inputs: Dict[str, torch.Tensor]) -> Dict[str, torch.Tensor]:
action = inputs['action']
if len(action.shape) == 1:
action = action.unsqueeze(1)
state_action_input = torch.cat([inputs['obs'], action], dim=1)
q_value = self._soft_q_net_forward(state_action_input)
return {'q_value': q_value}
从策略网络预测行动
def compute_actor(self, obs: torch.Tensor, deterministic_eval=False, epsilon=1e-6) -> Dict[str, torch.Tensor]:
mean, log_std = self._policy_net_forward(obs)
std = log_std.exp()
# unbounded Gaussian as the action distribution.
dist = Independent(Normal(mean, std), 1)
# for reparameterization trick (mean + std * N(0,1))
if deterministic_eval:
x = mean
else:
x = dist.rsample()
y = torch.tanh(x)
action = y
# epsilon is used to avoid log of zero/negative number.
y = 1 - y.pow(2) + epsilon
log_prob = dist.log_prob(x).unsqueeze(-1)
log_prob = log_prob - torch.log(y).sum(-1, keepdim=True)
return {'mean': mean, 'log_std': log_std, 'action': action, 'log_prob': log_prob}
注意
SAC 对高斯样本应用可逆的压缩函数,并使用变量变换公式来计算有界动作的可能性。
具体来说,我们通过 Independent(Normal(mean, std), 1) 使用无界高斯作为动作分布,这创建了一个与多元正态分布形状相同的对角正态分布。
这等同于 log_prob.sum(axis=-1)。
然后,动作通过 \(\tanh(\text{mean})\) 进行压缩,动作的对数似然具有简单的形式 \(\log \pi(\mathbf{a} \mid \mathbf{s})=\log \mu(\mathbf{u} \mid \mathbf{s})-\sum_{i=1}^{D} \log \left(1-\tanh ^{2}\left(u_{i}\right)\right)\)。
特别是,SAC 中的 std 是从观察中预测的,这与 PPO(可学习参数)和 TD3(启发式参数)不同。
熵正则化强化学习如下
目标q值中的熵。
# target q value. SARSA: first predict next action, then calculate next q value
with torch.no_grad():
(mu, sigma) = self._learn_model.forward(next_obs, mode='compute_actor')['logit']
dist = Independent(Normal(mu, sigma), 1)
pred = dist.rsample()
next_action = torch.tanh(pred)
y = 1 - next_action.pow(2) + 1e-6
# keep dimension for loss computation (usually for action space is 1 env. e.g. pendulum)
next_log_prob = dist.log_prob(pred).unsqueeze(-1)
next_log_prob = next_log_prob - torch.log(y).sum(-1, keepdim=True)
next_data = {'obs': next_obs, 'action': next_action}
target_q_value = self._target_model.forward(next_data, mode='compute_critic')['q_value']
# the value of a policy according to the maximum entropy objective
if self._twin_critic:
# find min one as target q value
target_q_value = torch.min(target_q_value[0],
target_q_value[1]) - self._alpha * next_log_prob.squeeze(-1)
else:
target_q_value = target_q_value - self._alpha * next_log_prob.squeeze(-1)
软Q值网络更新。
# =================
# q network
# =================
# compute q loss
if self._twin_q:
q_data0 = v_1step_td_data(q_value[0], target_value, reward, done, data['weight'])
loss_dict['q_loss'], td_error_per_sample0 = v_1step_td_error(q_data0, self._gamma)
q_data1 = v_1step_td_data(q_value[1], target_value, reward, done, data['weight'])
loss_dict['q_twin_loss'], td_error_per_sample1 = v_1step_td_error(q_data1, self._gamma)
td_error_per_sample = (td_error_per_sample0 + td_error_per_sample1) / 2
else:
q_data = v_1step_td_data(q_value, target_value, reward, done, data['weight'])
loss_dict['q_loss'], td_error_per_sample = v_1step_td_error(q_data, self._gamma)
# update q network
self._optimizer_q.zero_grad()
loss_dict['q_loss'].backward()
if self._twin_q:
loss_dict['q_twin_loss'].backward()
self._optimizer_q.step()
策略损失中的熵。
# compute policy loss
policy_loss = (self._alpha * log_prob - new_q_value.unsqueeze(-1)).mean()
loss_dict['policy_loss'] = policy_loss
# update policy network
self._optimizer_policy.zero_grad()
loss_dict['policy_loss'].backward()
self._optimizer_policy.step()
注意
我们通过\((\text{mean} + \text{std} * \mathcal{N}(0,1))\)实现重参数化技巧。特别是,sigma的梯度反向传播是通过策略损失中的log_prob进行的。
自动阿尔法策略
通过日志操作形状进行Alpha初始化。
if self._cfg.learn.is_auto_alpha:
self._target_entropy = -np.prod(self._cfg.model.action_shape)
self._log_alpha = torch.log(torch.tensor([self._cfg.learn.alpha]))
self._log_alpha = self._log_alpha.to(device='cuda' if self._cuda else 'cpu').requires_grad_()
self._alpha_optim = torch.optim.Adam([self._log_alpha], lr=self._cfg.learn.learning_rate_alpha)
self._is_auto_alpha = True
assert self._log_alpha.shape == torch.Size([1]) and self._log_alpha.requires_grad
self._alpha = self._log_alpha.detach().exp()
Alpha 更新。
# compute alpha loss
if self._is_auto_alpha:
log_prob = log_prob.detach() + self._target_entropy
loss_dict['alpha_loss'] = -(self._log_alpha * log_prob).mean()
self._alpha_optim.zero_grad()
loss_dict['alpha_loss'].backward()
self._alpha_optim.step()
self._alpha = self._log_alpha.detach().exp()
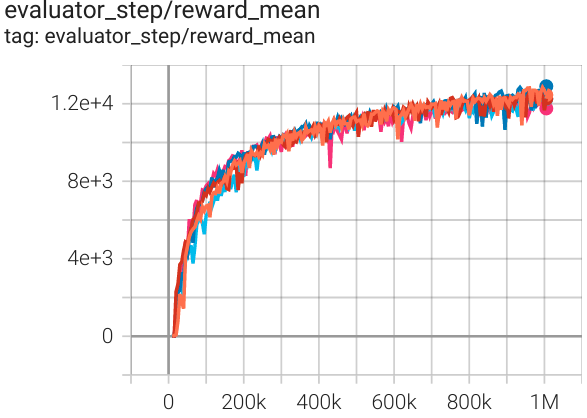
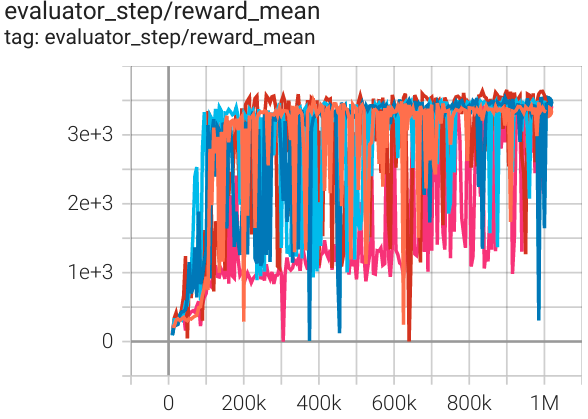
基准测试¶
环境 |
最佳平均奖励 |
评估结果 |
配置链接 |
比较 |
|---|---|---|---|---|
猎豹 (Halfcheetah-v3) |
12900 |
|
启动中 (13000) SB3(9535) Tianshou(12138) |
|
Walker2d (Walker2d-v2) |
5172 |

|
启动 (5300) SB3(3863) Tianshou(5007) |
|
霍珀 (Hopper-v2) |
3653 |
|
启动中 (3500) SB3(2325) 天授(3542) |
参考¶
Haarnoja等人。软演员-评论家算法及其应用。[https://arxiv.org/abs/1812.05905 arXiv:1812.05905], 2019.
Haarnoja 等人。软性演员-评论家:带有随机演员的离策略最大熵深度强化学习。[https://arxiv.org/abs/1801.01290 arXiv:1801.01290], 2018.