TD3¶
概述¶
Twin Delayed DDPG (TD3) 首次在2018年发表的论文 Addressing Function Approximation Error in Actor-Critic Methods 中被提出,它是一种考虑了策略和值更新中函数逼近误差之间相互作用的算法。 TD3 是一种基于 deep deterministic policy gradient (DDPG) 的 无模型(model-free) 算法,属于 演员—评委(actor-critic) 类算法中的一员。此算法可以解决高估偏差,时间差分方法中的误差积累以及连续动作空间中对超参数的高敏感性的问题。具体来说,TD3通过引入以下三个关键技巧来解决这些问题:
截断双 Q 学习(Clipped Double-Q Learning):在计算Bellman误差损失函数中的目标时,TD3 学习两个 Q 函数而不是一个,并使用较小的 Q 值。
延迟的策略更新(Delayed Policy Updates): TD3更新策略(和目标网络)的频率低于 Q 函数的更新频率。在本文中,作者建议在对 Q 函数更新两次后进行一次策略更新。在我们的实现中,TD3 仅在对 critic 网络更新一定次数 \(d\) 后,才对策略和目标网络进行一次更新。我们通过配置参数
learn.actor_update_freq来实现策略更新延迟。目标策略平滑(Target Policy Smoothing):通过沿动作变化平滑 Q 值,TD3 为目标动作引入噪声,使策略更加难以利用 Q 函数的预测错误。
核心要点¶
TD3 仅支持 连续动作空间 (例如: MuJoCo).
TD3 是一种 异策略(off-policy) 算法.
TD3 是一种 无模型(model-free) 和 演员—评委(actor-critic) 的强化学习算法,它会分别优化策略网络和Q网络。
关键方程或关键框图¶
TD3 提出了一个截断双 Q 学习变体(Clipped Double-Q Learning),它利用了这样一个概念,即遭受高估偏差的值估计可以用作真实值估计的近似上限。结合下式计算 \(Q_{\theta_1}\) 的 target,当 \(Q_{\theta_2} \textless Q_{\theta_1}\) 时,我们认为 \(Q_{\theta_1}\) 高估了,并将其当作真实值估计的近似上限,取较小的 \(Q_{\theta_2}\) 计算 \(y_1\) 以减少过估计。
作为原始版本双 Q 学习的一种拓展,此扩展的动机是,如果目标和当前网络过于相似,例如在actor-critic框架中使用缓慢变化的策略,原始版本的双 Q 学习有时是无效的。
TD3表明,目标网络是深度 Q 学习方法中的一种常见方法,通过减少误差积累来减少目标的方差是至关重要的。
首先,为了解决动作价值估计和策略提升的耦合问题,TD3建议延迟策略更新,直到动作价值估计值尽可能小。因此,TD3只在固定数量次数的 critic 网络更新后再更新策略和目标网络。
我们通过配置参数 learn.actor_update_freq 来实现策略更新延迟。
其次,截断双 Q 学习(Clipped Double Q-learning)算法的目标更新如下:
在实现中,我们可以通过使用单一的 actor 来优化 \(Q_{\theta_1}\) 以减少计算开销。由于 TD target 计算过程中使用了同样的策略,因此对于 \(Q_{\theta_2}\) 的优化目标, \(y_2= y_1\) 。
最后,确定性策略的一个问题是,由于以神经网络参数化的 Q 函数对 buffer 中动作的价值估计存在突然激增的尖峰(narrow peaks),这会导致策略网络过拟合到这些动作上。并且当更新 critic 网络时,使用确定性策略的学习目标极易受到函数近似误差引起的不准确性的影响,从而增加了目标的方差。 TD3 引入了一种用于深度价值学习的正则化策略,即目标策略平滑,它模仿了SARSA的学习更新。具体来说,TD3通过在目标策略中添加少量随机噪声并在多次计算以下数值后,取平均值来近似此期望:
我们通过配置 learn.noise、 learn.noise_sigma 和 learn.noise_range 来实现目标策略平滑。
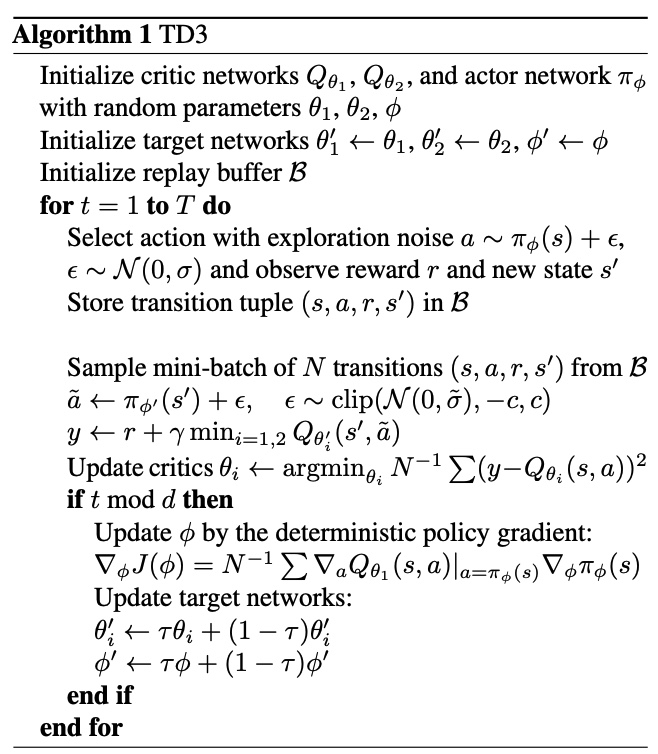
伪代码¶
扩展¶
TD3 可以与以下技术相结合使用:
遵循随机策略的经验回放池初始采集
在优化模型参数前,我们需要让经验回放池存有足够数目的遵循随机策略的 transition 数据,从而确保在算法初期模型不会对经验回放池数据过拟合。 DDPG/TD3 的
random-collect-size默认设置为25000, SAC 为10000。 我们只是简单地遵循 SpinningUp 默认设置,并使用随机策略来收集初始化数据。 我们通过配置random-collect-size来控制初始经验回放池中的 transition 数目。
实现¶
默认配置定义如下:
- class ding.policy.td3.TD3Policy(cfg: EasyDict, model: Module | None = None, enable_field: List[str] | None = None)[源代码]
- Overview:
TD3算法的策略类。由于DDPG和TD3有许多共同点,我们可以通过改变
_actor_update_freq、_twin_critic和模型包装器中的噪声,轻松地从DDPG类派生出这个TD3类。 论文链接: https://arxiv.org/pdf/1802.09477.pdf
配置:
ID
符号
类型
默认值
描述
其他(形状)
1
type字符串
td3
RL policy register name, referto registryPOLICY_REGISTRYthis arg is optional,a placeholder2
cuda布尔
假
Whether to use cuda for network3
random_collect_size整数
25000
Number of randomly collectedtraining samples in replaybuffer when training starts.Default to 25000 forDDPG/TD3, 10000 forsac.4
model.twin_critic布尔
真
Whether to use two criticnetworks or only one.Default True for TD3,Clipped DoubleQ-learning method inTD3 paper.5
learn.learning_rate_actor浮点数
1e-3
Learning rate for actornetwork(aka. policy).6
learn.learning_rate_critic浮点数
1e-3
Learning rates for criticnetwork (aka. Q-network).7
learn.actor_update_freq整数
2
When critic network updatesonce, how many times will actornetwork update.Default 2 for TD3, 1for DDPG. DelayedPolicy Updates methodin TD3 paper.8
learn.noise布尔
真
Whether to add noise on targetnetwork’s action.Default True for TD3,False for DDPG.Target Policy Smoo-thing Regularizationin TD3 paper.9
learn.noise_range字典
dict(min=-0.5,max=0.5,)Limit for range of targetpolicy smoothing noise,aka. noise_clip.10
learn.-ignore_done布尔
假
Determine whether to ignoredone flag.Use ignore_done onlyin halfcheetah env.11
learn.-target_theta浮点数
0.005
Used for soft update of thetarget network.aka. Interpolationfactor in polyak aver-aging for targetnetworks.12
collect.-noise_sigma浮点数
0.1
Used for add noise during co-llection, through controllingthe sigma of distributionSample noise from dis-tribution, Ornstein-Uhlenbeck process inDDPG paper, Gaussianprocess in ours.
模型
在这里,我们提供了 ContinuousQAC 模型作为 TD3 的默认模型的示例。
- class ding.model.ContinuousQAC(obs_shape: int | SequenceType, action_shape: int | SequenceType | EasyDict, action_space: str, twin_critic: bool = False, actor_head_hidden_size: int = 64, actor_head_layer_num: int = 1, critic_head_hidden_size: int = 64, critic_head_layer_num: int = 1, activation: Module | None = ReLU(), norm_type: str | None = None, encoder_hidden_size_list: SequenceType | None = None, share_encoder: bool | None = False)[source]
- Overview:
与Q值演员-评论家(QAC)相关的算法的神经网络和计算图,例如DDPG/TD3/SAC。该模型现在支持连续和混合动作空间。ContinuousQAC由四部分组成:
actor_encoder、critic_encoder、actor_head和critic_head。编码器用于从各种观察中提取特征。头部用于预测相应的Q值或动作逻辑。在高维观察空间(如2D图像)中,我们通常为actor_encoder和critic_encoder使用共享编码器。在低维观察空间(如1D向量)中,我们通常使用不同的编码器。- Interfaces:
__init__,forward,compute_actor,compute_critic
- compute_actor(obs: Tensor) Dict[str, Tensor | Dict[str, Tensor]][source]
- Overview:
QAC 前向计算图用于演员部分,输入观察张量以预测动作或动作对数。
- Arguments:
x (
torch.Tensor): 输入的观测张量数据。
- Returns:
输出 (
Dict[str, Union[torch.Tensor, Dict[str, torch.Tensor]]]): 根据动作空间变化的Actor输出字典:regression,reparameterization,hybrid。
- ReturnsKeys (regression):
动作 (
torch.Tensor): 与action_shape大小相同的连续动作,通常在 DDPG/TD3 中使用。
- ReturnsKeys (reparameterization):
logit (
Dict[str, torch.Tensor]): 预测的重新参数化动作logit,通常在SAC中使用。它是一个包含两个张量的列表:mu和sigma。前者是高斯分布的均值,后者是高斯分布的标准差。
- ReturnsKeys (hybrid):
logit (
torch.Tensor): 预测的离散动作类型的logit,它将与action_type_shape具有相同的维度,即所有可能的离散动作类型。action_args (
torch.Tensor): 连续动作参数,大小与action_args_shape相同。
- Shapes:
obs (
torch.Tensor): \((B, N0)\), B 是批量大小,N0 对应于obs_shape。动作 (
torch.Tensor): \((B, N1)\), B 是批量大小,N1 对应于action_shape。logit.mu (
torch.Tensor): \((B, N1)\), B 是批量大小,N1 对应于action_shape。logit.sigma (
torch.Tensor): \((B, N1)\), B 是批量大小。logit (
torch.Tensor): \((B, N2)\), B 是批量大小,N2 对应于action_shape.action_type_shape。action_args (
torch.Tensor): \((B, N3)\), B 是批量大小,N3 对应于action_shape.action_args_shape。
- Examples:
>>> # Regression mode >>> model = ContinuousQAC(64, 6, 'regression') >>> obs = torch.randn(4, 64) >>> actor_outputs = model(obs,'compute_actor') >>> assert actor_outputs['action'].shape == torch.Size([4, 6]) >>> # Reparameterization Mode >>> model = ContinuousQAC(64, 6, 'reparameterization') >>> obs = torch.randn(4, 64) >>> actor_outputs = model(obs,'compute_actor') >>> assert actor_outputs['logit'][0].shape == torch.Size([4, 6]) # mu >>> actor_outputs['logit'][1].shape == torch.Size([4, 6]) # sigma
- compute_critic(inputs: Dict[str, Tensor]) Dict[str, Tensor][source]
- Overview:
QAC 前向计算图用于评论家部分,输入观察和动作张量以预测 Q 值。
- Arguments:
输入 (
Dict[str, torch.Tensor]): 输入数据的字典,包括obs和action张量,在混合动作空间中还包含logit和action_args张量。
- ArgumentsKeys:
obs: (
torch.Tensor): 观测张量数据,现在支持一批一维向量数据。动作 (
Union[torch.Tensor, Dict]): 与action_shape大小相同的连续动作。logit (
torch.Tensor): 离散动作的logit,仅在混合动作空间中存在。action_args (
torch.Tensor): 连续动作参数,仅在混合动作空间中存在。
- Returns:
输出 (
Dict[str, torch.Tensor]): QAC前向计算图的输出字典,包括q_value。
- ReturnKeys:
q_value (
torch.Tensor): Q值张量,大小与批量大小相同。
- Shapes:
obs (
torch.Tensor): \((B, N1)\), 其中 B 是批量大小,N1 是obs_shape。logit (
torch.Tensor): \((B, N2)\), B 是批量大小,N2 对应于action_shape.action_type_shape。action_args (
torch.Tensor): \((B, N3)\), B 是批量大小,N3 对应于action_shape.action_args_shape。动作 (
torch.Tensor): \((B, N4)\), 其中 B 是批量大小,N4 是action_shape。q_value (
torch.Tensor): \((B, )\), 其中 B 是批量大小。
- Examples:
>>> inputs = {'obs': torch.randn(4, 8), 'action': torch.randn(4, 1)} >>> model = ContinuousQAC(obs_shape=(8, ),action_shape=1, action_space='regression') >>> assert model(inputs, mode='compute_critic')['q_value'].shape == (4, ) # q value
- forward(inputs: Tensor | Dict[str, Tensor], mode: str) Dict[str, Tensor][来源]
- Overview:
QAC前向计算图,输入观测张量以预测Q值或动作逻辑。不同的
mode将使用不同的网络模块进行前向传播,以获得不同的输出并节省计算。- Arguments:
输入 (
Union[torch.Tensor, Dict[str, torch.Tensor]]): 用于前向计算图的输入数据,对于compute_actor,它是观察张量,对于compute_critic,它是包含观察和动作张量的字典数据。模式 (
str): 前向模式,所有模式都在这个类的开头定义。
- Returns:
输出 (
Dict[str, torch.Tensor]): QAC前向计算图的输出字典,其键值在不同的前向模式中有所不同。
- Examples (Actor):
>>> # Regression mode >>> model = ContinuousQAC(64, 6, 'regression') >>> obs = torch.randn(4, 64) >>> actor_outputs = model(obs,'compute_actor') >>> assert actor_outputs['action'].shape == torch.Size([4, 6]) >>> # Reparameterization Mode >>> model = ContinuousQAC(64, 6, 'reparameterization') >>> obs = torch.randn(4, 64) >>> actor_outputs = model(obs,'compute_actor') >>> assert actor_outputs['logit'][0].shape == torch.Size([4, 6]) # mu >>> actor_outputs['logit'][1].shape == torch.Size([4, 6]) # sigma
- Examples (Critic):
>>> inputs = {'obs': torch.randn(4, 8), 'action': torch.randn(4, 1)} >>> model = ContinuousQAC(obs_shape=(8, ),action_shape=1, action_space='regression') >>> assert model(inputs, mode='compute_critic')['q_value'].shape == (4, ) # q value
训练 actor-critic 模型
首先,我们在
_init_learn中分别初始化 actor 和 critic 优化器。 设置两个独立的优化器可以保证我们在计算 actor 损失时只更新 actor 网络参数而不更新 critic 网络,反之亦然。# actor and critic optimizer self._optimizer_actor = Adam( self._model.actor.parameters(), lr=self._cfg.learn.learning_rate_actor, weight_decay=self._cfg.learn.weight_decay ) self._optimizer_critic = Adam( self._model.critic.parameters(), lr=self._cfg.learn.learning_rate_critic, weight_decay=self._cfg.learn.weight_decay )
- 在
_forward_learn中,我们通过计算 critic 损失、更新 critic 网络、计算 actor 损失和更新 actor 网络来更新 actor-critic 策略。 critic loss computation计算当前值和目标值
# current q value q_value = self._learn_model.forward(data, mode='compute_critic')['q_value'] q_value_dict = {} if self._twin_critic: q_value_dict['q_value'] = q_value[0].mean() q_value_dict['q_value_twin'] = q_value[1].mean() else: q_value_dict['q_value'] = q_value.mean() # target q value. SARSA: first predict next action, then calculate next q value with torch.no_grad(): next_action = self._target_model.forward(next_obs, mode='compute_actor')['action'] next_data = {'obs': next_obs, 'action': next_action} target_q_value = self._target_model.forward(next_data, mode='compute_critic')['q_value']
Q 网络目标(Clipped Double-Q Learning)和损失计算
if self._twin_critic: # TD3: two critic networks target_q_value = torch.min(target_q_value[0], target_q_value[1]) # find min one as target q value # network1 td_data = v_1step_td_data(q_value[0], target_q_value, reward, data['done'], data['weight']) critic_loss, td_error_per_sample1 = v_1step_td_error(td_data, self._gamma) loss_dict['critic_loss'] = critic_loss # network2(twin network) td_data_twin = v_1step_td_data(q_value[1], target_q_value, reward, data['done'], data['weight']) critic_twin_loss, td_error_per_sample2 = v_1step_td_error(td_data_twin, self._gamma) loss_dict['critic_twin_loss'] = critic_twin_loss td_error_per_sample = (td_error_per_sample1 + td_error_per_sample2) / 2 else: # DDPG: single critic network td_data = v_1step_td_data(q_value, target_q_value, reward, data['done'], data['weight']) critic_loss, td_error_per_sample = v_1step_td_error(td_data, self._gamma) loss_dict['critic_loss'] = critic_loss
critic network updateself._optimizer_critic.zero_grad() for k in loss_dict: if 'critic' in k: loss_dict[k].backward() self._optimizer_critic.step()
actor loss computation和actor network update取决于策略更新延迟(delaying the policy updates)的程度。if (self._forward_learn_cnt + 1) % self._actor_update_freq == 0: actor_data = self._learn_model.forward(data['obs'], mode='compute_actor') actor_data['obs'] = data['obs'] if self._twin_critic: actor_loss = -self._learn_model.forward(actor_data, mode='compute_critic')['q_value'][0].mean() else: actor_loss = -self._learn_model.forward(actor_data, mode='compute_critic')['q_value'].mean() loss_dict['actor_loss'] = actor_loss # actor update self._optimizer_actor.zero_grad() actor_loss.backward() self._optimizer_actor.step()
- 在
目标网络(Target Network)
我们通过
_init_learn中的self._target_model初始化来实现目标网络。 我们配置learn.target_theta来控制平均中的插值因子。# main and target models self._target_model = copy.deepcopy(self._model) self._target_model = model_wrap( self._target_model, wrapper_name='target', update_type='momentum', update_kwargs={'theta': self._cfg.learn.target_theta} )
目标策略平滑正则(Target Policy Smoothing Regularization)
我们通过
_init_learn中的目标模型初始化来实现目标策略平滑正则。 我们通过配置learn.noise、learn.noise_sigma和learn.noise_range来控制引入的噪声,通过对噪声进行截断使所选动作不会太过偏离原始动作。if self._cfg.learn.noise: self._target_model = model_wrap( self._target_model, wrapper_name='action_noise', noise_type='gauss', noise_kwargs={ 'mu': 0.0, 'sigma': self._cfg.learn.noise_sigma }, noise_range=self._cfg.learn.noise_range )
基准¶
环境 |
最佳平均奖励 |
评估结果 |
配置链接 |
比较 |
|---|---|---|---|---|
半猎豹 (HalfCheetah-v3) |
11148 |
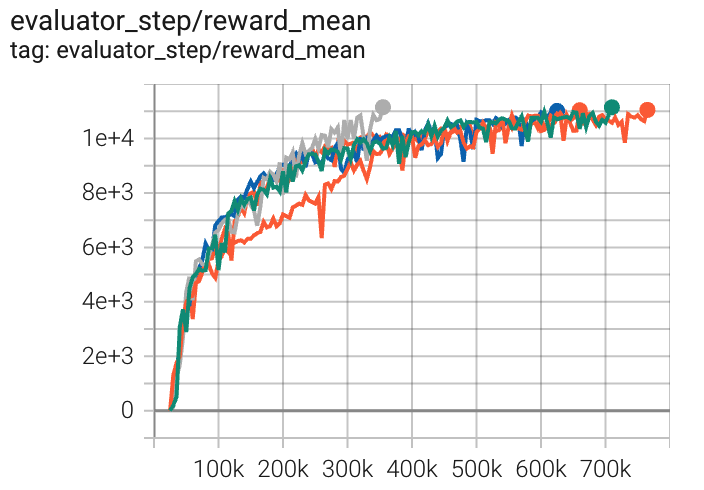
|
Tianshou(10201) Spinning-up(9750) Sb3(9656) |
|
霍珀 (Hopper-v2) |
3720 |
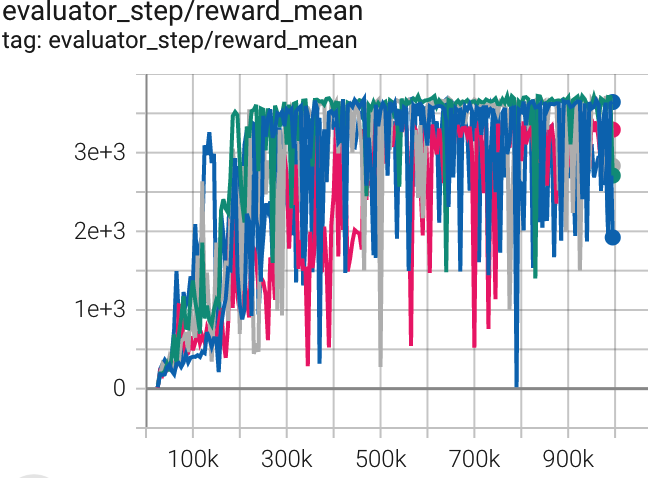
|
Tianshou(3472) Spinning-up(3982) sb3(3606 for Hopper-v3) |
|
Walker2d (Walker2d-v2) |
4386 |
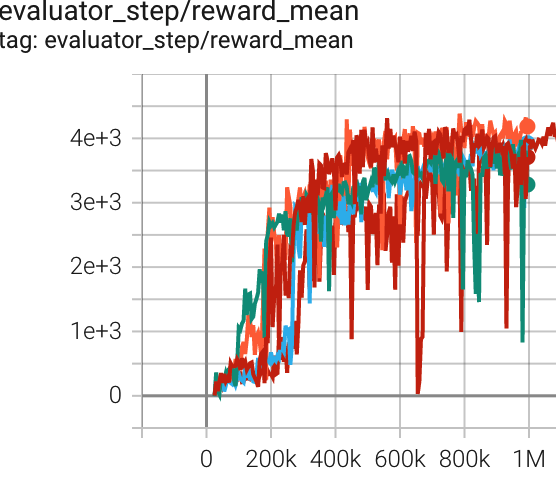
|
Tianshou(3982) Spinning-up(3472) sb3(4718 for Walker2d-v2) |
附注:
上述结果是通过在五个不同的随机种子(0,1,2,3,4)上运行相同的配置获得的。
参考文献¶
Scott Fujimoto, Herke van Hoof, David Meger: “解决Actor-Critic方法中的函数逼近误差问题”, 2018; [http://arxiv.org/abs/1802.09477 arXiv:1802.09477].