扩展预测教程#
[1]:
%matplotlib inline
import mxnet as mx
from mxnet import gluon
import numpy as np
import pandas as pd
import matplotlib.pyplot as plt
import json
import os
from itertools import islice
from pathlib import Path
[2]:
mx.random.seed(0)
np.random.seed(0)
数据集#
使用GluonTS的第一个要求是拥有一个合适的数据集。GluonTS为想要尝试各种模块的实践者提供了三种不同的选项:
使用GluonTS提供的可用数据集
使用GluonTS创建人工数据集
将您的数据集转换为GluonTS友好的格式
一般来说,一个数据集应满足一些最低格式要求,以与GluonTS兼容。特别是,它应该是一个可迭代的数据条目集合(时间序列),每个条目应至少具有一个 target 字段,该字段包含时间序列的实际值,以及一个 start 字段,该字段表示时间序列的开始日期。还有许多更多可选字段,我们将在本教程中进行介绍。
GluonTS提供的数据集符合适当的格式,可以直接使用,无需后处理。然而,自定义数据集需要进行转换。幸运的是,这是一项简单的任务。
GluonTS中的可用数据集#
GluonTS 提供了多个可用的数据库。
[3]:
from gluonts.dataset.repository import get_dataset, dataset_names
from gluonts.dataset.util import to_pandas
[4]:
print(f"Available datasets: {dataset_names}")
Available datasets: ['constant', 'exchange_rate', 'solar-energy', 'electricity', 'traffic', 'exchange_rate_nips', 'electricity_nips', 'traffic_nips', 'solar_nips', 'wiki2000_nips', 'wiki-rolling_nips', 'taxi_30min', 'kaggle_web_traffic_with_missing', 'kaggle_web_traffic_without_missing', 'kaggle_web_traffic_weekly', 'm1_yearly', 'm1_quarterly', 'm1_monthly', 'nn5_daily_with_missing', 'nn5_daily_without_missing', 'nn5_weekly', 'tourism_monthly', 'tourism_quarterly', 'tourism_yearly', 'cif_2016', 'london_smart_meters_without_missing', 'wind_farms_without_missing', 'car_parts_without_missing', 'dominick', 'fred_md', 'pedestrian_counts', 'hospital', 'covid_deaths', 'kdd_cup_2018_without_missing', 'weather', 'm3_monthly', 'm3_quarterly', 'm3_yearly', 'm3_other', 'm4_hourly', 'm4_daily', 'm4_weekly', 'm4_monthly', 'm4_quarterly', 'm4_yearly', 'm5', 'uber_tlc_daily', 'uber_tlc_hourly', 'airpassengers', 'australian_electricity_demand', 'electricity_hourly', 'electricity_weekly', 'rideshare_without_missing', 'saugeenday', 'solar_10_minutes', 'solar_weekly', 'sunspot_without_missing', 'temperature_rain_without_missing', 'vehicle_trips_without_missing', 'ercot', 'ett_small_15min', 'ett_small_1h']
要下载内置数据集之一,只需调用 get_dataset 并使用上述名称之一。GluonTS 可以重用保存的数据集,以便下次不需要再次下载。
[5]:
dataset = get_dataset("m4_hourly")
数据集中包含什么?#
一般来说,GluonTS 提供的数据集是由三个主要成员组成的对象:
dataset.train是一个可迭代的数据条目集合,用于训练。每个条目对应一个时间序列。dataset.test是用于推断的可迭代数据条目集合。测试数据集是训练数据集的扩展版本,包含每个时间序列末尾的一个窗口,这个窗口在训练过程中未被看到。这个窗口的长度等于推荐的预测长度。dataset.metadata包含数据集的元数据,例如时间序列的频率、推荐的预测时间范围、相关特征等。
首先,让我们看看训练数据集中第一个条目包含什么。我们应该期望每个条目至少有一个 target 和一个 start 字段,并且测试条目的目标具有一个额外的窗口,等于 prediction_length。
[6]:
# get the first time series in the training set
train_entry = next(iter(dataset.train))
train_entry.keys()
[6]:
dict_keys(['target', 'start', 'feat_static_cat', 'item_id'])
我们观察到除了必填字段外,还有一个 feat_static_cat 字段(我们可以安全地忽略 source 字段)。这表明数据集除了时间序列的值外,还有一些特征。目前,我们也将忽略这个字段。稍后我们将与所有其他可选字段一起详细解释它。
我们可以类似地检查测试数据集的第一个条目。我们应该期望与训练数据集中的字段完全相同。
[7]:
# get the first time series in the test set
test_entry = next(iter(dataset.test))
test_entry.keys()
[7]:
dict_keys(['target', 'start', 'feat_static_cat', 'item_id'])
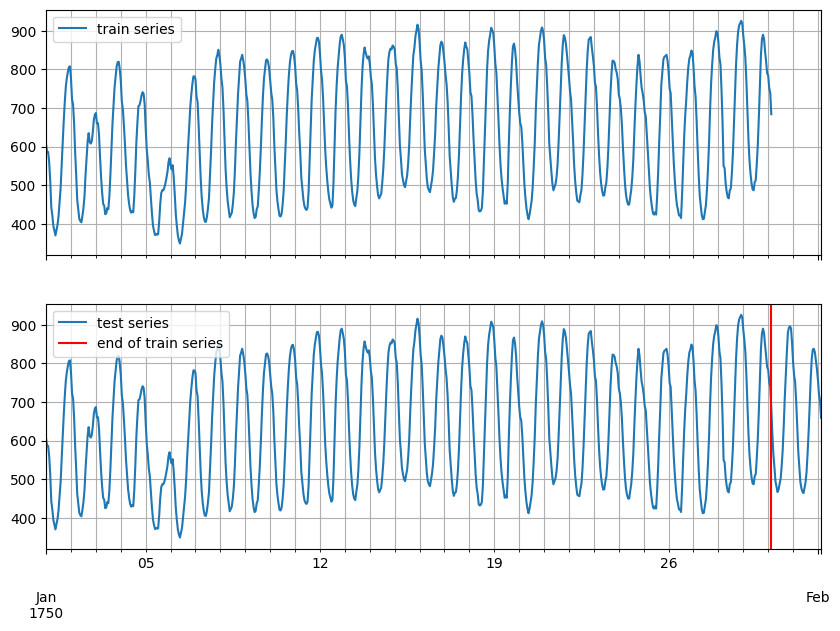
此外,我们应该预期目标在最后会有一个额外的窗口,长度等于 prediction_length。为了更好地理解这意味着什么,我们可以可视化训练和测试时间序列。
[8]:
test_series = to_pandas(test_entry)
train_series = to_pandas(train_entry)
fig, ax = plt.subplots(2, 1, sharex=True, sharey=True, figsize=(10, 7))
train_series.plot(ax=ax[0])
ax[0].grid(which="both")
ax[0].legend(["train series"], loc="upper left")
test_series.plot(ax=ax[1])
ax[1].axvline(train_series.index[-1], color="r") # end of train dataset
ax[1].grid(which="both")
ax[1].legend(["test series", "end of train series"], loc="upper left")
plt.show()
[9]:
print(
f"Length of forecasting window in test dataset: {len(test_series) - len(train_series)}"
)
print(f"Recommended prediction horizon: {dataset.metadata.prediction_length}")
print(f"Frequency of the time series: {dataset.metadata.freq}")
Length of forecasting window in test dataset: 48
Recommended prediction horizon: 48
Frequency of the time series: H
创建人工数据集#
我们可以轻松地使用 ComplexSeasonalTimeSeries 模块创建一个复杂的人造时间序列数据集。
[10]:
from gluonts.dataset.artificial import ComplexSeasonalTimeSeries
from gluonts.dataset.common import ListDataset
[11]:
artificial_dataset = ComplexSeasonalTimeSeries(
num_series=10,
prediction_length=21,
freq_str="H",
length_low=30,
length_high=200,
min_val=-10000,
max_val=10000,
is_integer=False,
proportion_missing_values=0,
is_noise=True,
is_scale=True,
percentage_unique_timestamps=1,
is_out_of_bounds_date=True,
)
我们可以访问人工数据集的一些重要元数据,如下所示:
[12]:
print(f"prediction length: {artificial_dataset.metadata.prediction_length}")
print(f"frequency: {artificial_dataset.metadata.freq}")
prediction length: 21
frequency: H
我们创建的人工数据集是一个字典列表。每个字典对应一个时间序列,并且应包含所需的字段。
[13]:
print(f"type of train dataset: {type(artificial_dataset.train)}")
print(f"train dataset fields: {artificial_dataset.train[0].keys()}")
print(f"type of test dataset: {type(artificial_dataset.test)}")
print(f"test dataset fields: {artificial_dataset.test[0].keys()}")
type of train dataset: <class 'list'>
train dataset fields: dict_keys(['start', 'target', 'item_id'])
type of test dataset: <class 'list'>
test dataset fields: dict_keys(['start', 'target', 'item_id'])
为了使用人工创建的数据集(字典列表),我们需要将它们转换为 ListDataset 对象。
[14]:
train_ds = ListDataset(artificial_dataset.train, freq=artificial_dataset.metadata.freq)
[15]:
test_ds = ListDataset(artificial_dataset.test, freq=artificial_dataset.metadata.freq)
[16]:
train_entry = next(iter(train_ds))
train_entry.keys()
[16]:
dict_keys(['start', 'target', 'item_id'])
[17]:
test_entry = next(iter(test_ds))
test_entry.keys()
[17]:
dict_keys(['start', 'target', 'item_id'])
[18]:
test_series = to_pandas(test_entry)
train_series = to_pandas(train_entry)
fig, ax = plt.subplots(2, 1, sharex=True, sharey=True, figsize=(10, 7))
train_series.plot(ax=ax[0])
ax[0].grid(which="both")
ax[0].legend(["train series"], loc="upper left")
test_series.plot(ax=ax[1])
ax[1].axvline(train_series.index[-1], color="r") # end of train dataset
ax[1].grid(which="both")
ax[1].legend(["test series", "end of train series"], loc="upper left")
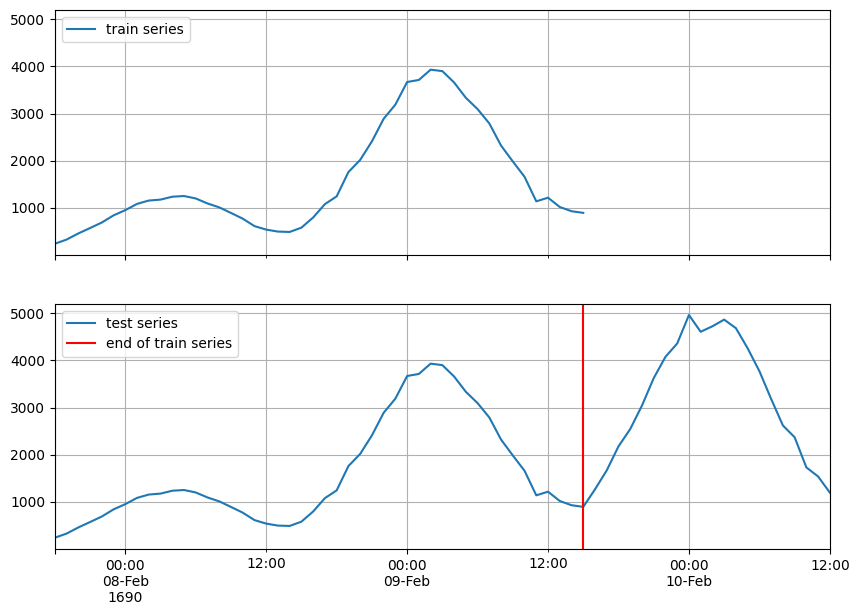
plt.show()
使用您的时间序列和特征#
现在,我们将看到如何将任何自定义数据集及其相关特征转换为适合GluonTS的格式。
如前所述,数据集至少需要包含 target 和 start 字段。然而,它可以有更多字段。让我们看看所有可用的字段:
[19]:
from gluonts.dataset.field_names import FieldName
[20]:
[
f"FieldName.{k} = '{v}'"
for k, v in FieldName.__dict__.items()
if not k.startswith("_")
]
[20]:
["FieldName.ITEM_ID = 'item_id'",
"FieldName.INFO = 'info'",
"FieldName.START = 'start'",
"FieldName.TARGET = 'target'",
"FieldName.FEAT_STATIC_CAT = 'feat_static_cat'",
"FieldName.FEAT_STATIC_REAL = 'feat_static_real'",
"FieldName.FEAT_DYNAMIC_CAT = 'feat_dynamic_cat'",
"FieldName.FEAT_DYNAMIC_REAL = 'feat_dynamic_real'",
"FieldName.PAST_FEAT_DYNAMIC_CAT = 'past_feat_dynamic_cat'",
"FieldName.PAST_FEAT_DYNAMIC_REAL = 'past_feat_dynamic_real'",
"FieldName.FEAT_DYNAMIC_REAL_LEGACY = 'dynamic_feat'",
"FieldName.FEAT_DYNAMIC = 'feat_dynamic'",
"FieldName.PAST_FEAT_DYNAMIC = 'past_feat_dynamic'",
"FieldName.FEAT_TIME = 'time_feat'",
"FieldName.FEAT_CONST = 'feat_dynamic_const'",
"FieldName.FEAT_AGE = 'feat_dynamic_age'",
"FieldName.OBSERVED_VALUES = 'observed_values'",
"FieldName.IS_PAD = 'is_pad'",
"FieldName.FORECAST_START = 'forecast_start'",
"FieldName.TARGET_DIM_INDICATOR = 'target_dimension_indicator'"]
字段分为三类:必填字段、可选字段,以及可以由 Transformation 添加的字段(稍后解释)。
必需:
start: 时间序列的开始日期target: 时间序列的值
可选:
feat_static_cat: 静态(随时间变化)分类特征,列表维度等于特征数量feat_static_real: 静态(随时间变化的)实际特征,列表的维度等于特征的数量feat_dynamic_cat: 动态(随时间变化)分类特征,形状为(特征数量,目标长度)的数组feat_dynamic_real: 动态(随时间变化)真实特征,形状为(特征数量,目标长度)的数组
添加者 Transformation:
time_feat: 与时间相关的特征,例如月份或天数feat_dynamic_const: 在时间轴上扩展常量值特征feat_dynamic_age: 年龄特征,即,对于遥远的过去时间戳,其值较小的特征,并且随着我们接近当前时间戳而单调增加observed_values: 观测值的指标,即,如果值被观测到,则特征等于1,如果值缺失,则等于0is_pad: 每个时间步的指示器,显示是否被填充(如果长度不足)forecast_start: 预测开始日期
作为一个简单的例子,我们可以创建一个自定义数据集来看看如何使用这些字段。数据集由一个目标,一个真实的动态特征(在这个例子中,我们设置为目标值的前一个周期),以及一个静态的分类特征组成,该特征指示我们用于创建目标的正弦波类型(不同的相位)。
[21]:
def create_dataset(num_series, num_steps, period=24, mu=1, sigma=0.3):
# create target: noise + pattern
# noise
noise = np.random.normal(mu, sigma, size=(num_series, num_steps))
# pattern - sinusoid with different phase
sin_minusPi_Pi = np.sin(
np.tile(np.linspace(-np.pi, np.pi, period), int(num_steps / period))
)
sin_Zero_2Pi = np.sin(
np.tile(np.linspace(0, 2 * np.pi, 24), int(num_steps / period))
)
pattern = np.concatenate(
(
np.tile(sin_minusPi_Pi.reshape(1, -1), (int(np.ceil(num_series / 2)), 1)),
np.tile(sin_Zero_2Pi.reshape(1, -1), (int(np.floor(num_series / 2)), 1)),
),
axis=0,
)
target = noise + pattern
# create time features: use target one period earlier, append with zeros
feat_dynamic_real = np.concatenate(
(np.zeros((num_series, period)), target[:, :-period]), axis=1
)
# create categorical static feats: use the sinusoid type as a categorical feature
feat_static_cat = np.concatenate(
(
np.zeros(int(np.ceil(num_series / 2))),
np.ones(int(np.floor(num_series / 2))),
),
axis=0,
)
return target, feat_dynamic_real, feat_static_cat
[22]:
# define the parameters of the dataset
custom_ds_metadata = {
"num_series": 100,
"num_steps": 24 * 7,
"prediction_length": 24,
"freq": "1H",
"start": [pd.Period("01-01-2019", freq="1H") for _ in range(100)],
}
[23]:
data_out = create_dataset(
custom_ds_metadata["num_series"],
custom_ds_metadata["num_steps"],
custom_ds_metadata["prediction_length"],
)
target, feat_dynamic_real, feat_static_cat = data_out
我们可以通过简单地填写正确的字段轻松创建训练和测试数据集。请记住,对于训练数据集,我们需要截断最后一个窗口。
[24]:
train_ds = ListDataset(
[
{
FieldName.TARGET: target,
FieldName.START: start,
FieldName.FEAT_DYNAMIC_REAL: [fdr],
FieldName.FEAT_STATIC_CAT: [fsc],
}
for (target, start, fdr, fsc) in zip(
target[:, : -custom_ds_metadata["prediction_length"]],
custom_ds_metadata["start"],
feat_dynamic_real[:, : -custom_ds_metadata["prediction_length"]],
feat_static_cat,
)
],
freq=custom_ds_metadata["freq"],
)
[25]:
test_ds = ListDataset(
[
{
FieldName.TARGET: target,
FieldName.START: start,
FieldName.FEAT_DYNAMIC_REAL: [fdr],
FieldName.FEAT_STATIC_CAT: [fsc],
}
for (target, start, fdr, fsc) in zip(
target, custom_ds_metadata["start"], feat_dynamic_real, feat_static_cat
)
],
freq=custom_ds_metadata["freq"],
)
现在,我们可以检查训练和测试数据集的每个条目。我们应该期待它们具有以下字段: target, start, feat_dynamic_real 和 feat_static_cat。
[26]:
train_entry = next(iter(train_ds))
train_entry.keys()
[26]:
dict_keys(['target', 'start', 'feat_dynamic_real', 'feat_static_cat'])
[27]:
test_entry = next(iter(test_ds))
test_entry.keys()
[27]:
dict_keys(['target', 'start', 'feat_dynamic_real', 'feat_static_cat'])
[28]:
test_series = to_pandas(test_entry)
train_series = to_pandas(train_entry)
fig, ax = plt.subplots(2, 1, sharex=True, sharey=True, figsize=(10, 7))
train_series.plot(ax=ax[0])
ax[0].grid(which="both")
ax[0].legend(["train series"], loc="upper left")
test_series.plot(ax=ax[1])
ax[1].axvline(train_series.index[-1], color="r") # end of train dataset
ax[1].grid(which="both")
ax[1].legend(["test series", "end of train series"], loc="upper left")
plt.show()

在本教程的其余部分,我们将使用自定义数据集
转换#
定义一个转换#
一个Transformation的主要使用案例是特征处理,例如,添加假期特征,以及定义在训练和推断期间将数据集分割成适当窗口的方式。
一般来说,它获取数据集的可迭代条目集合,并将其转换为另一个可能包含更多字段的可迭代集合。这种转换是通过根据对我们模型有用的内容定义一组“操作”来对原始数据集进行的。这些操作通常会创建一些额外的特征或转换现有的特征。作为示例,下面我们添加以下转换:
AddObservedValuesIndicator: 在数据集中创建observed_values字段,即添加一个特征,当值被观察时等于 1,当值缺失时等于 0AddAgeFeature: 在数据集中创建feat_dynamic_age字段,即添加一个特征,其值对于远离当前时间戳的过去时间戳较小,并且随着时间接近当前时间戳而单调增加
可以使用的另一个变换是 InstanceSplitter,它用于定义在训练、验证或预测时数据集将如何在示例窗口中进行拆分。 InstanceSplitter 的配置如下(跳过明显的字段):
is_pad_field: 指示时间序列是否被填充(如果长度不足)train_sampler: 定义训练窗口是如何切割/采样的time_series_fields: 包含与目标以相同方式需要拆分的时间依赖特征
[29]:
from gluonts.transform import (
AddAgeFeature,
AddObservedValuesIndicator,
Chain,
ExpectedNumInstanceSampler,
InstanceSplitter,
SetFieldIfNotPresent,
)
[30]:
def create_transformation(freq, context_length, prediction_length):
return Chain(
[
AddObservedValuesIndicator(
target_field=FieldName.TARGET,
output_field=FieldName.OBSERVED_VALUES,
),
AddAgeFeature(
target_field=FieldName.TARGET,
output_field=FieldName.FEAT_AGE,
pred_length=prediction_length,
log_scale=True,
),
InstanceSplitter(
target_field=FieldName.TARGET,
is_pad_field=FieldName.IS_PAD,
start_field=FieldName.START,
forecast_start_field=FieldName.FORECAST_START,
instance_sampler=ExpectedNumInstanceSampler(
num_instances=1,
min_future=prediction_length,
),
past_length=context_length,
future_length=prediction_length,
time_series_fields=[
FieldName.FEAT_AGE,
FieldName.FEAT_DYNAMIC_REAL,
FieldName.OBSERVED_VALUES,
],
),
]
)
转换数据集#
现在,我们可以通过将上述转换应用于我们创建的自定义数据集来创建一个转换对象。
[31]:
transformation = create_transformation(
custom_ds_metadata["freq"],
2 * custom_ds_metadata["prediction_length"], # can be any appropriate value
custom_ds_metadata["prediction_length"],
)
[32]:
train_tf = transformation(iter(train_ds), is_train=True)
[33]:
type(train_tf)
[33]:
generator
如预期的那样,输出是另一个可迭代对象。我们可以轻松检查转换数据集中某个条目包含的内容。InstanceSplitter 在转换数据集上迭代,并通过随机选择一个时间序列和该时间序列上的起始点来切割窗口(这种“随机性”由 instance_sampler 定义)。
[34]:
train_tf_entry = next(iter(train_tf))
[k for k in train_tf_entry.keys()]
[34]:
['start',
'feat_static_cat',
'past_feat_dynamic_age',
'future_feat_dynamic_age',
'past_feat_dynamic_real',
'future_feat_dynamic_real',
'past_observed_values',
'future_observed_values',
'past_target',
'future_target',
'past_is_pad',
'forecast_start']
变压器已经完成了我们要求的工作。特别是,它添加了:
观察值的字段 (
observed_values)年龄特征的字段 (
feat_dynamic_age)一些额外有用的字段 (
past_is_pad,forecast_start)
它还做了一件更重要的事情:它将窗口分为过去和未来,并为所有时间依赖字段添加了相应的前缀。这样我们可以轻松地使用例如 past_target 字段作为输入,以及 future_target 字段来计算我们预测的错误。当然,过去的长度等于 context_length,未来的长度等于 prediction_length。
[35]:
print(f"past target shape: {train_tf_entry['past_target'].shape}")
print(f"future target shape: {train_tf_entry['future_target'].shape}")
print(f"past observed values shape: {train_tf_entry['past_observed_values'].shape}")
print(f"future observed values shape: {train_tf_entry['future_observed_values'].shape}")
print(f"past age feature shape: {train_tf_entry['past_feat_dynamic_age'].shape}")
print(f"future age feature shape: {train_tf_entry['future_feat_dynamic_age'].shape}")
print(train_tf_entry["feat_static_cat"])
past target shape: (48,)
future target shape: (24,)
past observed values shape: (48,)
future observed values shape: (24,)
past age feature shape: (48, 1)
future age feature shape: (24, 1)
[0]
为了比较,我们再来看一下转换前原始数据集中有哪些字段:
[36]:
[k for k in next(iter(train_ds)).keys()]
[36]:
['target', 'start', 'feat_dynamic_real', 'feat_static_cat']
现在,我们可以继续看看测试数据集是如何划分的。正如我们看到的,转换将窗口拆分为过去和未来。然而,在推断期间(is_train=False在转换中),分割器总是切割数据集的最后一个窗口(长度为context_length),以便可以用来预测后续未知值的长度prediction_length。
那么,由于我们不知道未来的目标,测试数据集是如何划分过去和未来的?时间依赖特征又如何呢?
[37]:
test_tf = transformation(iter(test_ds), is_train=False)
[38]:
test_tf_entry = next(iter(test_tf))
[k for k in test_tf_entry.keys()]
[38]:
['start',
'feat_static_cat',
'past_feat_dynamic_age',
'future_feat_dynamic_age',
'past_feat_dynamic_real',
'future_feat_dynamic_real',
'past_observed_values',
'future_observed_values',
'past_target',
'future_target',
'past_is_pad',
'forecast_start']
[39]:
print(f"past target shape: {test_tf_entry['past_target'].shape}")
print(f"future target shape: {test_tf_entry['future_target'].shape}")
print(f"past observed values shape: {test_tf_entry['past_observed_values'].shape}")
print(f"future observed values shape: {test_tf_entry['future_observed_values'].shape}")
print(f"past age feature shape: {test_tf_entry['past_feat_dynamic_age'].shape}")
print(f"future age feature shape: {test_tf_entry['future_feat_dynamic_age'].shape}")
print(test_tf_entry["feat_static_cat"])
past target shape: (48,)
future target shape: (24,)
past observed values shape: (48,)
future observed values shape: (24,)
past age feature shape: (48, 1)
future age feature shape: (24, 1)
[0]
未来的目标是空的,但功能不是 - 我们总是假设我们知道未来的功能!
我们在这里手动做的所有事情都是由一个内部块完成的,称为 DataLoader。它以原始数据集(以适当的格式)和转换对象作为输入,并逐批输出转换后的可迭代数据集。我们唯一需要担心的是正确设置转换字段!
训练现有模型#
GluonTS 提供了许多预构建的模型。用户只需要配置一些超参数。现有模型主要集中在(但不限于)概率预测。概率预测是以概率分布的形式进行的预测,而不仅仅是单一的点估计。通过对预测视野中每个时间步的未来分布进行估计,我们可以从每个时间步的分布中提取样本,从而创建一个可以被视为未来可能实现的“样本路径”。在实践中,我们提取多个样本,并创建多个样本路径,这可以用于可视化、模型评估、导出统计数据等。
配置估计器#
我们将从GluonTS的预构建前馈神经网络估计器开始,这是一个简单但强大的预测模型。我们将使用该模型演示训练模型、产生预测和评估结果的过程。
GluonTS 内置的前馈神经网络 (SimpleFeedForwardEstimator) 接受长度为 context_length 的输入窗口,并预测后续 prediction_length 值的分布。在 GluonTS 的术语中,前馈神经网络模型是 Estimator 的一个例子。在 GluonTS 中,Estimator 对象表示一个预测模型以及其系数、权重等细节。
一般来说,每个估计器(预构建或自定义)由多个超参数配置,这些超参数可以是所有估计器之间的通用(但不具约束性)(例如,prediction_length)或特定于特定估计器(例如,神经网络的层数或CNN中的步幅)。
最后,每个估计器通过一个 Trainer 进行配置,该配置定义了模型将如何训练,即训练轮数、学习率等。
[40]:
from gluonts.mx import SimpleFeedForwardEstimator, Trainer
[41]:
estimator = SimpleFeedForwardEstimator(
num_hidden_dimensions=[10],
prediction_length=custom_ds_metadata["prediction_length"],
context_length=2 * custom_ds_metadata["prediction_length"],
trainer=Trainer(
ctx="cpu",
epochs=5,
learning_rate=1e-3,
hybridize=False,
num_batches_per_epoch=100,
),
)
获取预测器#
在指定了所有必要的超参数后,我们可以通过调用估计器的 train 方法,使用我们的训练数据集 dataset.train 来训练它。训练算法返回一个拟合模型(在GluonTS术语中为 Predictor),可以用于构建预测。
我们在这里应该强调,像上面定义的单一模型是在训练数据集 train_ds 中包含的所有时间序列上进行训练的。这导致了一个 全局 模型,适合对 train_ds 中的所有时间序列进行预测,并可能适用于其他未见过的相关时间序列。
[42]:
predictor = estimator.train(train_ds)
100%|██████████| 100/100 [00:00<00:00, 121.53it/s, epoch=1/5, avg_epoch_loss=1.28]
100%|██████████| 100/100 [00:00<00:00, 124.61it/s, epoch=2/5, avg_epoch_loss=0.735]
100%|██████████| 100/100 [00:00<00:00, 122.58it/s, epoch=3/5, avg_epoch_loss=0.677]
100%|██████████| 100/100 [00:00<00:00, 124.03it/s, epoch=4/5, avg_epoch_loss=0.644]
100%|██████████| 100/100 [00:00<00:00, 136.28it/s, epoch=5/5, avg_epoch_loss=0.605]
保存/加载现有模型#
一个拟合模型,即一个 Predictor,可以方便地保存和加载:
[43]:
# save the trained model in tmp/
from pathlib import Path
predictor.serialize(Path("/tmp/"))
WARNING:root:Serializing RepresentableBlockPredictor instances does not save the prediction network structure in a backwards-compatible manner. Be careful not to use this method in production.
[44]:
# loads it back
from gluonts.model.predictor import Predictor
predictor_deserialized = Predictor.deserialize(Path("/tmp/"))
评估#
获取预测#
有了预测因子,我们现在可以预测dataset.test的最后一个窗口并评估我们模型的性能。
GluonTS 提供了 make_evaluation_predictions 函数,自动化预测和模型评估的过程。大致上,这个函数执行以下步骤:
移除我们想要预测的
dataset.test的最后一个长度为prediction_length的窗口估计器使用剩余的数据预测(以样本路径的形式)刚刚移除的“未来”窗口
该模块输出预测样本路径和
dataset.test(作为python生成器对象)
[45]:
from gluonts.evaluation import make_evaluation_predictions
[46]:
forecast_it, ts_it = make_evaluation_predictions(
dataset=test_ds, # test dataset
predictor=predictor, # predictor
num_samples=100, # number of sample paths we want for evaluation
)
首先,我们可以将这些生成器转换为列表,以便于后续的计算。
[47]:
forecasts = list(forecast_it)
tss = list(ts_it)
我们可以检查这些列表的第一个元素(即对应于数据集的第一个时间序列)。让我们从包含时间序列的列表开始,即 tss。我们期望 tss 的第一个条目包含 test_ds 的(目标)第一个时间序列。
[48]:
# first entry of the time series list
ts_entry = tss[0]
[49]:
# first 5 values of the time series (convert from pandas to numpy)
np.array(ts_entry[:5]).reshape(
-1,
)
[49]:
array([1.5292157 , 0.85025036, 0.7740374 , 0.941432 , 0.6723822 ],
dtype=float32)
[50]:
# first entry of test_ds
test_ds_entry = next(iter(test_ds))
[51]:
# first 5 values
test_ds_entry["target"][:5]
[51]:
array([1.5292157 , 0.85025036, 0.7740374 , 0.941432 , 0.6723822 ],
dtype=float32)
forecast 列表中的条目稍微复杂一些。它们是包含所有样本路径的对象,以 numpy.ndarray 形式呈现,维度为 (num_samples, prediction_length),预测的开始日期,时间序列的频率等。我们可以通过简单地调用预测对象的相应属性来访问所有这些信息。
[52]:
# first entry of the forecast list
forecast_entry = forecasts[0]
[53]:
print(f"Number of sample paths: {forecast_entry.num_samples}")
print(f"Dimension of samples: {forecast_entry.samples.shape}")
print(f"Start date of the forecast window: {forecast_entry.start_date}")
print(f"Frequency of the time series: {forecast_entry.freq}")
Number of sample paths: 100
Dimension of samples: (100, 24)
Start date of the forecast window: 2019-01-07 00:00
Frequency of the time series: <Hour>
我们还可以进行计算来总结样本路径,例如计算预测窗口中每个24个时间步的均值或分位数。
[54]:
print(f"Mean of the future window:\n {forecast_entry.mean}")
print(f"0.5-quantile (median) of the future window:\n {forecast_entry.quantile(0.5)}")
Mean of the future window:
[ 0.90765196 0.5002642 0.58970827 0.39372978 0.09580009 0.05871432
-0.09855336 0.21287599 0.06411848 0.36389527 0.6184984 0.82686234
1.1362944 1.4422988 1.5806047 1.885066 1.6728904 1.8457131
2.0097268 1.7956799 1.6775795 1.587245 1.2241242 1.0475011 ]
0.5-quantile (median) of the future window:
[ 9.2138731e-01 5.3099197e-01 5.4954773e-01 3.5585621e-01
1.3284978e-01 5.4421678e-02 -5.3116154e-02 1.7734313e-01
-1.0389383e-03 3.8981181e-01 6.4071041e-01 8.7102258e-01
1.1050647e+00 1.2608457e+00 1.5636476e+00 1.9202025e+00
1.7487336e+00 1.8408449e+00 2.0478199e+00 1.7664530e+00
1.7128807e+00 1.6053847e+00 1.2772603e+00 1.0452789e+00]
Forecast 对象具有 plot 方法,可以总结预测路径的均值、预测区间等。预测区间以不同的颜色着色,形成“扇形图”。
[55]:
plt.plot(ts_entry[-150:].to_timestamp())
forecast_entry.plot(show_label=True)
plt.legend()
[55]:
<matplotlib.legend.Legend at 0x7f24980497f0>
计算指标#
我们还可以对预测的质量进行数值评估。在GluonTS中,Evaluator类可以计算综合性能指标,以及每个时间序列的指标(这对于分析不同时间序列之间的性能可能很有用)。
[56]:
from gluonts.evaluation import Evaluator
[57]:
evaluator = Evaluator(quantiles=[0.1, 0.5, 0.9])
agg_metrics, item_metrics = evaluator(tss, forecasts)
Running evaluation: 100it [00:00, 2858.91it/s]
汇总指标同时跨时间步长和时间序列进行汇总。
[58]:
print(json.dumps(agg_metrics, indent=4))
{
"MSE": 0.11030595362186432,
"abs_error": 631.219958782196,
"abs_target_sum": 2505.765546798706,
"abs_target_mean": 1.044068977832794,
"seasonal_error": 0.3378558193842571,
"MASE": 0.7856021114063411,
"MAPE": 2.2423562081654866,
"sMAPE": 0.5366955331961314,
"MSIS": 5.561884554254895,
"num_masked_target_values": 0.0,
"QuantileLoss[0.1]": 274.70157045163216,
"Coverage[0.1]": 0.09208333333333334,
"QuantileLoss[0.5]": 631.2199574247934,
"Coverage[0.5]": 0.4904166666666667,
"QuantileLoss[0.9]": 295.76119372472164,
"Coverage[0.9]": 0.8820833333333331,
"RMSE": 0.332123401195797,
"NRMSE": 0.3181048457978281,
"ND": 0.2519070308028716,
"wQuantileLoss[0.1]": 0.10962780249037385,
"wQuantileLoss[0.5]": 0.25190703026115985,
"wQuantileLoss[0.9]": 0.11803226926101591,
"mean_absolute_QuantileLoss": 400.5609072003824,
"mean_wQuantileLoss": 0.15985570067084987,
"MAE_Coverage": 0.39402777777777764,
"OWA": NaN
}
个体指标仅在时间步长之间汇总。
[59]:
item_metrics.head()
[59]:
| 项ID | 预测开始 | 均方误差 | 绝对误差 | 绝对目标总和 | 绝对目标均值 | 季节性误差 | 平均绝对比例误差 | 平均绝对百分比误差 | 对称平均绝对百分比误差 | 掩盖目标值的数量 | 净损失 | 均值平方根误差 | 分位损失[0.1] | 覆盖率[0.1] | 分位损失[0.5] | 覆盖率[0.5] | 分位损失[0.9] | 覆盖率[0.9] | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 0 | 无 | 2019-01-07 00:00 | 0.123998 | 7.011340 | 24.638548 | 1.026606 | 0.351642 | 0.830787 | 0.627694 | 0.607183 | 0.0 | 0.284568 | 5.906248 | 2.286915 | 0.083333 | 7.011340 | 0.541667 | 3.406847 | 0.875000 |
| 1 | 无 | 2019-01-07 00:00 | 0.109331 | 5.898170 | 22.178631 | 0.924110 | 0.340241 | 0.722302 | 1.439482 | 0.555920 | 0.0 | 0.265939 | 5.646115 | 2.598318 | 0.083333 | 5.898170 | 0.666667 | 3.049512 | 0.916667 |
| 2 | 无 | 2019-01-07 00:00 | 0.150442 | 6.913772 | 26.601139 | 1.108381 | 0.323560 | 0.890326 | 0.419949 | 0.536978 | 0.0 | 0.259905 | 6.923015 | 3.400284 | 0.125000 | 6.913772 | 0.500000 | 3.971697 | 0.791667 |
| 3 | 无 | 2019-01-07 00:00 | 0.124376 | 6.302595 | 22.502333 | 0.937597 | 0.311026 | 0.844329 | 1.099858 | 0.609671 | 0.0 | 0.280086 | 7.677102 | 3.067686 | 0.208333 | 6.302595 | 0.583333 | 3.414130 | 0.958333 |
| 4 | 无 | 2019-01-07 00:00 | 0.073736 | 4.519842 | 25.864388 | 1.077683 | 0.313119 | 0.601453 | 0.920273 | 0.425719 | 0.0 | 0.174752 | 6.257542 | 2.332712 | 0.041667 | 4.519842 | 0.500000 | 2.810995 | 0.916667 |
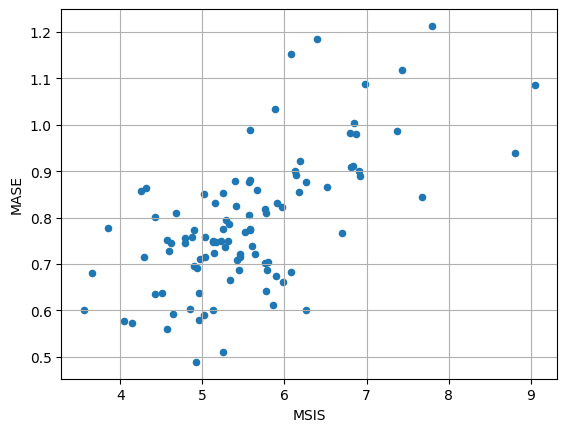
[60]:
item_metrics.plot(x="MSIS", y="MASE", kind="scatter")
plt.grid(which="both")
plt.show()
创建您自己的模型#
为了创建我们自己的预测模型,我们需要:
定义训练和预测网络
定义一个新的估计器,该估计器指定任何数据处理并使用网络
训练和预测网络可以是任意复杂的,但它们应遵循一些基本规则:
两者都应该有一个
hybrid_forward方法,定义当网络被调用时应该发生什么训练网络的
hybrid_forward应该根据预测值和真实值返回一个 损失预测网络的
hybrid_forward应该返回预测结果
估计量应包括以下方法:
create_transformation,定义所有的数据预处理转换(如添加特征)create_training_data_loader, 构建数据加载器,从给定的数据集中提供用于训练的批次create_training_network,返回配置有必要超参数的训练网络create_predictor,创建预测网络,并返回一个Predictor对象
如果要接受验证数据集以计算某个验证指标,那么还应定义以下内容:
create_validation_data_loader
一个 Predictor 定义了给定预测器的 predictor.predict 方法。该方法接受测试数据集,将其传递通过预测网络以获得预测,并生成预测结果。您可以将 Predictor 对象视为定义其 predict 方法的预测网络的包装器。
在本节中,我们将简单地创建一个限制为点预测的前馈网络。然后,我们将通过扩展到概率预测,考虑特征和时间序列的缩放,来增加网络的复杂性,最后我们将用RNN替换它。
我们需要强调的是,以下模型的实现方式以及所做的所有设计选择既不是强制性的,也不一定是最佳的。它们的唯一目的是提供如何构建模型的指南和提示。
使用简单前馈网络的点预测#
我们可以创建一个简单的训练网络,定义一个神经网络,该网络以长度为 context_length 的窗口作为输入,并预测后续维度为 prediction_length 的窗口(因此,网络的输出维度为 prediction_length)。训练网络的 hybrid_forward 方法返回 L1 损失的均值。
预测网络与训练网络是相同的(应该是相同的),通过继承类实现,并且它的 hybrid_forward 方法返回预测结果。
[61]:
class MyNetwork(gluon.HybridBlock):
def __init__(self, prediction_length, num_cells, **kwargs):
super().__init__(**kwargs)
self.prediction_length = prediction_length
self.num_cells = num_cells
with self.name_scope():
# Set up a 3 layer neural network that directly predicts the target values
self.nn = mx.gluon.nn.HybridSequential()
self.nn.add(mx.gluon.nn.Dense(units=self.num_cells, activation="relu"))
self.nn.add(mx.gluon.nn.Dense(units=self.num_cells, activation="relu"))
self.nn.add(
mx.gluon.nn.Dense(units=self.prediction_length, activation="softrelu")
)
class MyTrainNetwork(MyNetwork):
def hybrid_forward(self, F, past_target, future_target):
prediction = self.nn(past_target)
# calculate L1 loss with the future_target to learn the median
return (prediction - future_target).abs().mean(axis=-1)
class MyPredNetwork(MyTrainNetwork):
# The prediction network only receives past_target and returns predictions
def hybrid_forward(self, F, past_target):
prediction = self.nn(past_target)
return prediction.expand_dims(axis=1)
估计器类通过一些超参数进行配置,并实现所需的方法。
[62]:
from functools import partial
from mxnet.gluon import HybridBlock
from gluonts.core.component import validated
from gluonts.dataset.loader import TrainDataLoader
from gluonts.model.predictor import Predictor
from gluonts.mx import (
batchify,
copy_parameters,
get_hybrid_forward_input_names,
GluonEstimator,
RepresentableBlockPredictor,
Trainer,
)
from gluonts.transform import (
ExpectedNumInstanceSampler,
Transformation,
InstanceSplitter,
TestSplitSampler,
SelectFields,
Chain,
)
[63]:
class MyEstimator(GluonEstimator):
@validated()
def __init__(
self,
prediction_length: int,
context_length: int,
num_cells: int,
batch_size: int = 32,
trainer: Trainer = Trainer(),
) -> None:
super().__init__(trainer=trainer, batch_size=batch_size)
self.prediction_length = prediction_length
self.context_length = context_length
self.num_cells = num_cells
def create_transformation(self):
return Chain([])
def create_training_data_loader(self, dataset, **kwargs):
instance_splitter = InstanceSplitter(
target_field=FieldName.TARGET,
is_pad_field=FieldName.IS_PAD,
start_field=FieldName.START,
forecast_start_field=FieldName.FORECAST_START,
instance_sampler=ExpectedNumInstanceSampler(
num_instances=1, min_future=self.prediction_length
),
past_length=self.context_length,
future_length=self.prediction_length,
)
input_names = get_hybrid_forward_input_names(MyTrainNetwork)
return TrainDataLoader(
dataset=dataset,
transform=instance_splitter + SelectFields(input_names),
batch_size=self.batch_size,
stack_fn=partial(batchify, ctx=self.trainer.ctx, dtype=self.dtype),
**kwargs,
)
def create_training_network(self) -> MyTrainNetwork:
return MyTrainNetwork(
prediction_length=self.prediction_length, num_cells=self.num_cells
)
def create_predictor(
self, transformation: Transformation, trained_network: HybridBlock
) -> Predictor:
prediction_splitter = InstanceSplitter(
target_field=FieldName.TARGET,
is_pad_field=FieldName.IS_PAD,
start_field=FieldName.START,
forecast_start_field=FieldName.FORECAST_START,
instance_sampler=TestSplitSampler(),
past_length=self.context_length,
future_length=self.prediction_length,
)
prediction_network = MyPredNetwork(
prediction_length=self.prediction_length, num_cells=self.num_cells
)
copy_parameters(trained_network, prediction_network)
return RepresentableBlockPredictor(
input_transform=transformation + prediction_splitter,
prediction_net=prediction_network,
batch_size=self.batch_size,
prediction_length=self.prediction_length,
ctx=self.trainer.ctx,
)
在定义训练和预测网络以及估计器类后,我们可以按照与现有模型完全相同的步骤进行操作,即,我们可以通过将所有所需的超参数传递给估计器类来指定我们的估计器,通过调用其 train 方法来训练估计器以创建预测器,最后使用 make_evaluation_predictions 函数生成我们的预测。
[64]:
estimator = MyEstimator(
prediction_length=custom_ds_metadata["prediction_length"],
context_length=2 * custom_ds_metadata["prediction_length"],
num_cells=40,
trainer=Trainer(
ctx="cpu",
epochs=5,
learning_rate=1e-3,
hybridize=False,
num_batches_per_epoch=100,
),
)
估计器可以通过调用其 train 方法来使用我们的训练数据集 train_ds 进行训练。训练返回一个可用于预测的预测器。
[65]:
predictor = estimator.train(train_ds)
100%|██████████| 100/100 [00:00<00:00, 257.30it/s, epoch=1/5, avg_epoch_loss=0.48]
100%|██████████| 100/100 [00:00<00:00, 268.75it/s, epoch=2/5, avg_epoch_loss=0.319]
100%|██████████| 100/100 [00:00<00:00, 288.90it/s, epoch=3/5, avg_epoch_loss=0.302]
100%|██████████| 100/100 [00:00<00:00, 296.54it/s, epoch=4/5, avg_epoch_loss=0.289]
100%|██████████| 100/100 [00:00<00:00, 284.35it/s, epoch=5/5, avg_epoch_loss=0.288]
[66]:
forecast_it, ts_it = make_evaluation_predictions(
dataset=test_ds, # test dataset
predictor=predictor, # predictor
num_samples=100, # number of sample paths we want for evaluation
)
[67]:
forecasts = list(forecast_it)
tss = list(ts_it)
[68]:
plt.plot(tss[0][-150:].to_timestamp())
forecasts[0].plot(show_label=True)
plt.legend()
[68]:
<matplotlib.legend.Legend at 0x7f2498018880>
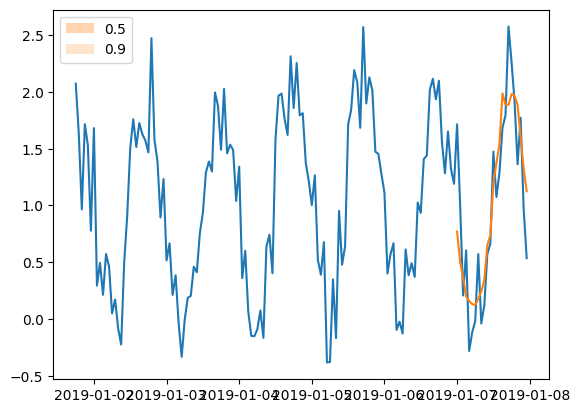
请注意,我们实际上看不到预测中的任何预测区间。这是可以预期的,因为我们定义的模型并不进行概率预测,而只是给出点估计。通过要求在这样的网络中进行100个样本路径(在 make_evaluation_predictions 中定义),我们得到100次相同的输出。
概率预测#
模型如何学习分布?#
概率预测要求我们学习时间序列未来值的分布,而不是像点预测那样学习值本身。为此,我们需要指定未来值遵循的分布类型。GluonTS 提供了多种不同的分布,涵盖了许多使用案例,例如高斯分布、Student-t 分布和均匀分布等。
为了学习一个分布,我们需要学习它的参数。例如,在我们假设为高斯分布的简单情况下,我们需要学习完全定义分布的均值和方差。
在GluonTS中可用的每个分布都由相应的 Distribution 类定义(例如, Gaussian)。该类定义了分布的参数、其(对数)似然性以及一种取样方法(给定参数)。
然而,将这种分布与模型连接并学习其参数并不是简单的事情。为此,每个分布都有一个 DistributionOutput 类(例如, GaussianOutput)。这个类的作用是将模型与分布连接起来。它的主要用途是将模型的输出映射到分布的参数。你可以把它想象成模型之上的一个额外投影层。这个层的参数与网络的其余部分一起被优化。
通过包含这个投影层,我们的模型有效地学习了每个时间步长所选择的分布的参数。这样的模型通常通过选择所选分布的负对数似然作为损失函数来进行优化。在我们优化模型并学习参数后,我们可以从学习到的分布中抽样或推导任何其他有用的统计数据。
用于概率预测的前馈网络#
让我们看看我们需要对之前的模型做哪些更改以使其具有概率性:
首先,我们需要更改网络的输出。在点预测网络中,输出是一个长度为
prediction_length的向量,直接给出了点估计。现在,我们需要输出一组特征,这些特征将被DistributionOutput用于投影到分布参数。这些特征在预测视野的每个时间步骤应该是不同的。因此,我们需要一个总输出为prediction_length * num_features的值。这个
DistributionOutput接收一个张量作为输入,并使用最后一个维度作为要投影到分布参数的特征。这里,我们需要每个时间步的分布对象,即prediction_length个分布对象。考虑到网络的输出有prediction_length * num_features个值,我们可以将其重塑为(prediction_length, num_features)并获取所需的分布,而最后一个长度为num_features的轴将被投影到分布参数上。我们希望预测网络为每个时间序列输出多个样本路径。为此,我们可以将每个时间序列重复多次,重复的次数为样本路径的数量,并为每个样本进行标准预测。
请注意,在我们处理的所有张量中,有一个初始维度指的是批次,例如,网络的输出具有维度 (batch_size, prediction_length * num_features)。
[69]:
from gluonts.mx import DistributionOutput, GaussianOutput
[70]:
class MyProbNetwork(gluon.HybridBlock):
def __init__(
self, prediction_length, distr_output, num_cells, num_sample_paths=100, **kwargs
) -> None:
super().__init__(**kwargs)
self.prediction_length = prediction_length
self.distr_output = distr_output
self.num_cells = num_cells
self.num_sample_paths = num_sample_paths
self.proj_distr_args = distr_output.get_args_proj()
with self.name_scope():
# Set up a 2 layer neural network that its ouput will be projected to the distribution parameters
self.nn = mx.gluon.nn.HybridSequential()
self.nn.add(mx.gluon.nn.Dense(units=self.num_cells, activation="relu"))
self.nn.add(
mx.gluon.nn.Dense(
units=self.prediction_length * self.num_cells, activation="relu"
)
)
class MyProbTrainNetwork(MyProbNetwork):
def hybrid_forward(self, F, past_target, future_target):
# compute network output
net_output = self.nn(past_target)
# (batch, prediction_length * nn_features) -> (batch, prediction_length, nn_features)
net_output = net_output.reshape(0, self.prediction_length, -1)
# project network output to distribution parameters domain
distr_args = self.proj_distr_args(net_output)
# compute distribution
distr = self.distr_output.distribution(distr_args)
# negative log-likelihood
loss = distr.loss(future_target)
return loss
class MyProbPredNetwork(MyProbTrainNetwork):
# The prediction network only receives past_target and returns predictions
def hybrid_forward(self, F, past_target):
# repeat past target: from (batch_size, past_target_length) to
# (batch_size * num_sample_paths, past_target_length)
repeated_past_target = past_target.repeat(repeats=self.num_sample_paths, axis=0)
# compute network output
net_output = self.nn(repeated_past_target)
# (batch * num_sample_paths, prediction_length * nn_features) -> (batch * num_sample_paths, prediction_length, nn_features)
net_output = net_output.reshape(0, self.prediction_length, -1)
# project network output to distribution parameters domain
distr_args = self.proj_distr_args(net_output)
# compute distribution
distr = self.distr_output.distribution(distr_args)
# get (batch_size * num_sample_paths, prediction_length) samples
samples = distr.sample()
# reshape from (batch_size * num_sample_paths, prediction_length) to
# (batch_size, num_sample_paths, prediction_length)
return samples.reshape(
shape=(-1, self.num_sample_paths, self.prediction_length)
)
我们在估计器上需要进行的更改很小,主要反映了我们的网络使用的额外 distr_output 参数。
[71]:
class MyProbEstimator(GluonEstimator):
@validated()
def __init__(
self,
prediction_length: int,
context_length: int,
distr_output: DistributionOutput,
num_cells: int,
num_sample_paths: int = 100,
batch_size: int = 32,
trainer: Trainer = Trainer(),
) -> None:
super().__init__(trainer=trainer, batch_size=batch_size)
self.prediction_length = prediction_length
self.context_length = context_length
self.distr_output = distr_output
self.num_cells = num_cells
self.num_sample_paths = num_sample_paths
def create_transformation(self):
return Chain([])
def create_training_data_loader(self, dataset, **kwargs):
instance_splitter = InstanceSplitter(
target_field=FieldName.TARGET,
is_pad_field=FieldName.IS_PAD,
start_field=FieldName.START,
forecast_start_field=FieldName.FORECAST_START,
instance_sampler=ExpectedNumInstanceSampler(
num_instances=1, min_future=self.prediction_length
),
past_length=self.context_length,
future_length=self.prediction_length,
)
input_names = get_hybrid_forward_input_names(MyProbTrainNetwork)
return TrainDataLoader(
dataset=dataset,
transform=instance_splitter + SelectFields(input_names),
batch_size=self.batch_size,
stack_fn=partial(batchify, ctx=self.trainer.ctx, dtype=self.dtype),
**kwargs,
)
def create_training_network(self) -> MyProbTrainNetwork:
return MyProbTrainNetwork(
prediction_length=self.prediction_length,
distr_output=self.distr_output,
num_cells=self.num_cells,
num_sample_paths=self.num_sample_paths,
)
def create_predictor(
self, transformation: Transformation, trained_network: HybridBlock
) -> Predictor:
prediction_splitter = InstanceSplitter(
target_field=FieldName.TARGET,
is_pad_field=FieldName.IS_PAD,
start_field=FieldName.START,
forecast_start_field=FieldName.FORECAST_START,
instance_sampler=TestSplitSampler(),
past_length=self.context_length,
future_length=self.prediction_length,
)
prediction_network = MyProbPredNetwork(
prediction_length=self.prediction_length,
distr_output=self.distr_output,
num_cells=self.num_cells,
num_sample_paths=self.num_sample_paths,
)
copy_parameters(trained_network, prediction_network)
return RepresentableBlockPredictor(
input_transform=transformation + prediction_splitter,
prediction_net=prediction_network,
batch_size=self.batch_size,
prediction_length=self.prediction_length,
ctx=self.trainer.ctx,
)
[72]:
estimator = MyProbEstimator(
prediction_length=custom_ds_metadata["prediction_length"],
context_length=2 * custom_ds_metadata["prediction_length"],
distr_output=GaussianOutput(),
num_cells=40,
trainer=Trainer(
ctx="cpu",
epochs=5,
learning_rate=1e-3,
hybridize=False,
num_batches_per_epoch=100,
),
)
[73]:
predictor = estimator.train(train_ds)
100%|██████████| 100/100 [00:00<00:00, 218.24it/s, epoch=1/5, avg_epoch_loss=0.793]
100%|██████████| 100/100 [00:00<00:00, 218.60it/s, epoch=2/5, avg_epoch_loss=0.399]
100%|██████████| 100/100 [00:00<00:00, 192.27it/s, epoch=3/5, avg_epoch_loss=0.371]
100%|██████████| 100/100 [00:00<00:00, 223.83it/s, epoch=4/5, avg_epoch_loss=0.351]
100%|██████████| 100/100 [00:00<00:00, 222.29it/s, epoch=5/5, avg_epoch_loss=0.343]
[74]:
forecast_it, ts_it = make_evaluation_predictions(
dataset=test_ds, # test dataset
predictor=predictor, # predictor
num_samples=100, # number of sample paths we want for evaluation
)
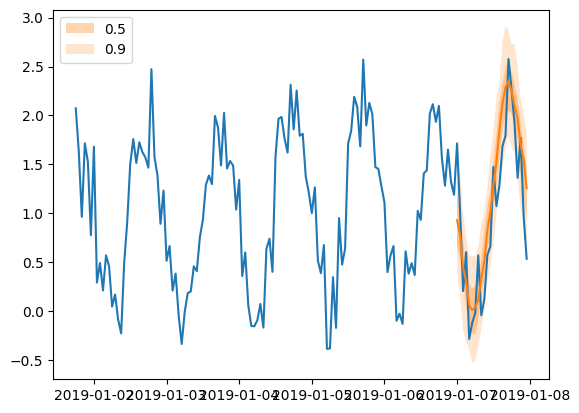
[75]:
forecasts = list(forecast_it)
tss = list(ts_it)
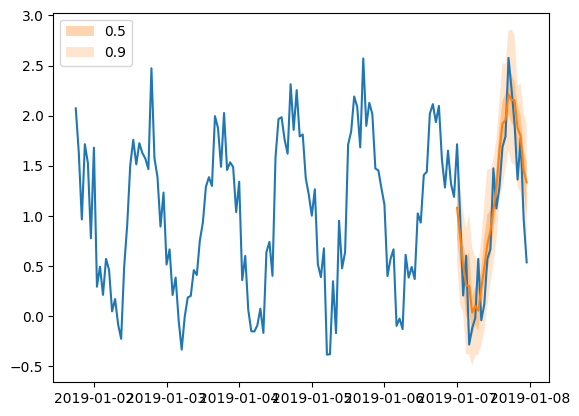
[76]:
plt.plot(tss[0][-150:].to_timestamp())
forecasts[0].plot(show_label=True)
plt.legend()
[76]:
<matplotlib.legend.Legend at 0x7f249808ac40>

添加功能和扩展性#
在之前的网络中,我们仅使用了目标,并未利用数据集的任何特征。在这里,我们通过包含数据集的 feat_dynamic_real 字段来扩展概率网络,这可能增强我们模型的预测能力。我们通过将目标和特征连接成一个增强向量来实现这一点,该向量构成了新的网络输入。
数据集中可用的所有特征都可能作为我们模型的输入。然而,为了本示例的目的,我们将限制只使用一个特征。
从业者需要经常处理的一个重要问题是数据集中时间序列值的不同数量级。对于模型来说,训练和预测处于大致相同值范围的值是非常有帮助的。为了解决这个问题,我们向模型中添加了一个 Scaler ,该模型计算每个时间序列的尺度。然后我们可以相应地缩放时间序列或任何相关特征的值,并将这些作为输入用于网络。
[77]:
from gluonts.mx import MeanScaler, NOPScaler
[78]:
class MyProbNetwork(gluon.HybridBlock):
def __init__(
self,
prediction_length,
context_length,
distr_output,
num_cells,
num_sample_paths=100,
scaling=True,
**kwargs
) -> None:
super().__init__(**kwargs)
self.prediction_length = prediction_length
self.context_length = context_length
self.distr_output = distr_output
self.num_cells = num_cells
self.num_sample_paths = num_sample_paths
self.proj_distr_args = distr_output.get_args_proj()
self.scaling = scaling
with self.name_scope():
# Set up a 2 layer neural network that its ouput will be projected to the distribution parameters
self.nn = mx.gluon.nn.HybridSequential()
self.nn.add(mx.gluon.nn.Dense(units=self.num_cells, activation="relu"))
self.nn.add(
mx.gluon.nn.Dense(
units=self.prediction_length * self.num_cells, activation="relu"
)
)
if scaling:
self.scaler = MeanScaler(keepdims=True)
else:
self.scaler = NOPScaler(keepdims=True)
def compute_scale(self, past_target, past_observed_values):
# scale shape is (batch_size, 1)
_, scale = self.scaler(
past_target.slice_axis(axis=1, begin=-self.context_length, end=None),
past_observed_values.slice_axis(
axis=1, begin=-self.context_length, end=None
),
)
return scale
class MyProbTrainNetwork(MyProbNetwork):
def hybrid_forward(
self,
F,
past_target,
future_target,
past_observed_values,
past_feat_dynamic_real,
):
# compute scale
scale = self.compute_scale(past_target, past_observed_values)
# scale target and time features
past_target_scale = F.broadcast_div(past_target, scale)
past_feat_dynamic_real_scale = F.broadcast_div(
past_feat_dynamic_real.squeeze(axis=-1), scale
)
# concatenate target and time features to use them as input to the network
net_input = F.concat(past_target_scale, past_feat_dynamic_real_scale, dim=-1)
# compute network output
net_output = self.nn(net_input)
# (batch, prediction_length * nn_features) -> (batch, prediction_length, nn_features)
net_output = net_output.reshape(0, self.prediction_length, -1)
# project network output to distribution parameters domain
distr_args = self.proj_distr_args(net_output)
# compute distribution
distr = self.distr_output.distribution(distr_args, scale=scale)
# negative log-likelihood
loss = distr.loss(future_target)
return loss
class MyProbPredNetwork(MyProbTrainNetwork):
# The prediction network only receives past_target and returns predictions
def hybrid_forward(
self, F, past_target, past_observed_values, past_feat_dynamic_real
):
# repeat fields: from (batch_size, past_target_length) to
# (batch_size * num_sample_paths, past_target_length)
repeated_past_target = past_target.repeat(repeats=self.num_sample_paths, axis=0)
repeated_past_observed_values = past_observed_values.repeat(
repeats=self.num_sample_paths, axis=0
)
repeated_past_feat_dynamic_real = past_feat_dynamic_real.repeat(
repeats=self.num_sample_paths, axis=0
)
# compute scale
scale = self.compute_scale(repeated_past_target, repeated_past_observed_values)
# scale repeated target and time features
repeated_past_target_scale = F.broadcast_div(repeated_past_target, scale)
repeated_past_feat_dynamic_real_scale = F.broadcast_div(
repeated_past_feat_dynamic_real.squeeze(axis=-1), scale
)
# concatenate target and time features to use them as input to the network
net_input = F.concat(
repeated_past_target_scale, repeated_past_feat_dynamic_real_scale, dim=-1
)
# compute network oputput
net_output = self.nn(net_input)
# (batch * num_sample_paths, prediction_length * nn_features) -> (batch * num_sample_paths, prediction_length, nn_features)
net_output = net_output.reshape(0, self.prediction_length, -1)
# project network output to distribution parameters domain
distr_args = self.proj_distr_args(net_output)
# compute distribution
distr = self.distr_output.distribution(distr_args, scale=scale)
# get (batch_size * num_sample_paths, prediction_length) samples
samples = distr.sample()
# reshape from (batch_size * num_sample_paths, prediction_length) to
# (batch_size, num_sample_paths, prediction_length)
return samples.reshape(
shape=(-1, self.num_sample_paths, self.prediction_length)
)
[79]:
class MyProbEstimator(GluonEstimator):
@validated()
def __init__(
self,
prediction_length: int,
context_length: int,
distr_output: DistributionOutput,
num_cells: int,
num_sample_paths: int = 100,
scaling: bool = True,
batch_size: int = 32,
trainer: Trainer = Trainer(),
) -> None:
super().__init__(trainer=trainer, batch_size=batch_size)
self.prediction_length = prediction_length
self.context_length = context_length
self.distr_output = distr_output
self.num_cells = num_cells
self.num_sample_paths = num_sample_paths
self.scaling = scaling
def create_transformation(self):
# Feature transformation that the model uses for input.
return AddObservedValuesIndicator(
target_field=FieldName.TARGET,
output_field=FieldName.OBSERVED_VALUES,
)
def create_training_data_loader(self, dataset, **kwargs):
instance_splitter = InstanceSplitter(
target_field=FieldName.TARGET,
is_pad_field=FieldName.IS_PAD,
start_field=FieldName.START,
forecast_start_field=FieldName.FORECAST_START,
instance_sampler=ExpectedNumInstanceSampler(
num_instances=1, min_future=self.prediction_length
),
past_length=self.context_length,
future_length=self.prediction_length,
time_series_fields=[
FieldName.FEAT_DYNAMIC_REAL,
FieldName.OBSERVED_VALUES,
],
)
input_names = get_hybrid_forward_input_names(MyProbTrainNetwork)
return TrainDataLoader(
dataset=dataset,
transform=instance_splitter + SelectFields(input_names),
batch_size=self.batch_size,
stack_fn=partial(batchify, ctx=self.trainer.ctx, dtype=self.dtype),
**kwargs,
)
def create_training_network(self) -> MyProbTrainNetwork:
return MyProbTrainNetwork(
prediction_length=self.prediction_length,
context_length=self.context_length,
distr_output=self.distr_output,
num_cells=self.num_cells,
num_sample_paths=self.num_sample_paths,
scaling=self.scaling,
)
def create_predictor(
self, transformation: Transformation, trained_network: HybridBlock
) -> Predictor:
prediction_splitter = InstanceSplitter(
target_field=FieldName.TARGET,
is_pad_field=FieldName.IS_PAD,
start_field=FieldName.START,
forecast_start_field=FieldName.FORECAST_START,
instance_sampler=TestSplitSampler(),
past_length=self.context_length,
future_length=self.prediction_length,
time_series_fields=[
FieldName.FEAT_DYNAMIC_REAL,
FieldName.OBSERVED_VALUES,
],
)
prediction_network = MyProbPredNetwork(
prediction_length=self.prediction_length,
context_length=self.context_length,
distr_output=self.distr_output,
num_cells=self.num_cells,
num_sample_paths=self.num_sample_paths,
scaling=self.scaling,
)
copy_parameters(trained_network, prediction_network)
return RepresentableBlockPredictor(
input_transform=transformation + prediction_splitter,
prediction_net=prediction_network,
batch_size=self.batch_size,
prediction_length=self.prediction_length,
ctx=self.trainer.ctx,
)
[80]:
estimator = MyProbEstimator(
prediction_length=custom_ds_metadata["prediction_length"],
context_length=2 * custom_ds_metadata["prediction_length"],
distr_output=GaussianOutput(),
num_cells=40,
trainer=Trainer(
ctx="cpu",
epochs=5,
learning_rate=1e-3,
hybridize=False,
num_batches_per_epoch=100,
),
)
[81]:
predictor = estimator.train(train_ds)
100%|██████████| 100/100 [00:00<00:00, 119.95it/s, epoch=1/5, avg_epoch_loss=0.967]
100%|██████████| 100/100 [00:00<00:00, 123.75it/s, epoch=2/5, avg_epoch_loss=0.536]
100%|██████████| 100/100 [00:00<00:00, 135.19it/s, epoch=3/5, avg_epoch_loss=0.483]
100%|██████████| 100/100 [00:00<00:00, 126.54it/s, epoch=4/5, avg_epoch_loss=0.455]
100%|██████████| 100/100 [00:00<00:00, 122.88it/s, epoch=5/5, avg_epoch_loss=0.431]
[82]:
forecast_it, ts_it = make_evaluation_predictions(
dataset=test_ds, # test dataset
predictor=predictor, # predictor
num_samples=100, # number of sample paths we want for evaluation
)
[83]:
forecasts = list(forecast_it)
tss = list(ts_it)
[84]:
plt.plot(tss[0][-150:].to_timestamp())
forecasts[0].plot(show_label=True)
plt.legend()
[84]:
<matplotlib.legend.Legend at 0x7f24cf974ac0>
从前馈神经网络到递归神经网络#
在之前所有的例子中,我们使用了前馈神经网络作为我们预测模型的基础。其主要思想是将时间序列的一个窗口(长度为 context_length)作为网络的输入,并训练网络以预测接下来的窗口(长度为 prediction_length)。
在本节中,我们将用递归神经网络(RNN)替换前馈网络。由于RNN的不同性质,网络的结构会有一些不同。让我们看看主要的变化是什么。
训练#
RNN 的主要思想与我们已经构建的前馈网络相同:当我们在每个时间步骤展开 RNN 时,我们将过去的时间序列值作为输入,并预测下一个值。我们可以通过使用多个过去值(例如基于季节性模式的特定滞后)或可用特征来增强输入。然而,在这个例子中,我们将保持简单,只使用时间序列的最后一个值。网络在每个时间步骤的输出是下一个时间步骤值的分布,其中 RNN 的状态作为分布参数投影的特征向量。
由于RNN的顺序特性,在时间序列的切分窗口中区分 past_ 和 future_ 实际上并不是必需的。因此,我们可以将 past_target 和 future_target 连接起来,作为我们希望预测的具体 target 窗口。这意味着RNN的输入将是(按顺序)窗口 target[-(context_length + prediction_length + 1):-1] (在我们想预测的窗口之前一个时间步)。因此,我们需要在每个切分的窗口中拥有 context_length + prediction_length + 1 个可用值。我们可以在 InstanceSplitter 中定义这一点。
总体来说,在训练期间步骤如下:
我们依次通过RNN传递目标值
target[-(context_length + prediction_length + 1):-1]我们在每个时间步使用RNN的状态作为特征向量,并将其投影到分布参数域
每个时间步骤的输出是下一个时间步骤值的分布,总体上是窗口的预测分布
target[-(context_length + prediction_length):]
上述步骤在unroll_encoder方法中实现。
推断#
在推理过程中,我们仅知道 past_target 的值,因此我们不能完全按照训练时的步骤进行。然而,主要思路是非常相似的:
我们依次通过RNN传递过去的目标值
past_target[-(context_length + 1):],以有效更新RNN的状态在最后一个时间步,RNN的输出实际上是时间序列下一个值的分布(我们并不知道这个值)。因此,我们从这个分布中进行抽样 (
num_sample_paths次),并将样本作为RNN下一个时间步的输入。我们重复前一步
prediction_length次
第一步在 unroll_encoder 中实现,最后一步在 sample_decoder 方法中实现。
[85]:
class MyProbRNN(gluon.HybridBlock):
def __init__(
self,
prediction_length,
context_length,
distr_output,
num_cells,
num_layers,
num_sample_paths=100,
scaling=True,
**kwargs
) -> None:
super().__init__(**kwargs)
self.prediction_length = prediction_length
self.context_length = context_length
self.distr_output = distr_output
self.num_cells = num_cells
self.num_layers = num_layers
self.num_sample_paths = num_sample_paths
self.proj_distr_args = distr_output.get_args_proj()
self.scaling = scaling
with self.name_scope():
self.rnn = mx.gluon.rnn.HybridSequentialRNNCell()
for k in range(self.num_layers):
cell = mx.gluon.rnn.LSTMCell(hidden_size=self.num_cells)
cell = mx.gluon.rnn.ResidualCell(cell) if k > 0 else cell
self.rnn.add(cell)
if scaling:
self.scaler = MeanScaler(keepdims=True)
else:
self.scaler = NOPScaler(keepdims=True)
def compute_scale(self, past_target, past_observed_values):
# scale is computed on the context length last units of the past target
# scale shape is (batch_size, 1, *target_shape)
_, scale = self.scaler(
past_target.slice_axis(axis=1, begin=-self.context_length, end=None),
past_observed_values.slice_axis(
axis=1, begin=-self.context_length, end=None
),
)
return scale
def unroll_encoder(
self,
F,
past_target,
past_observed_values,
future_target=None,
future_observed_values=None,
):
# overall target field
# input target from -(context_length + prediction_length + 1) to -1
if future_target is not None: # during training
target_in = F.concat(past_target, future_target, dim=-1).slice_axis(
axis=1,
begin=-(self.context_length + self.prediction_length + 1),
end=-1,
)
# overall observed_values field
# input observed_values corresponding to target_in
observed_values_in = F.concat(
past_observed_values, future_observed_values, dim=-1
).slice_axis(
axis=1,
begin=-(self.context_length + self.prediction_length + 1),
end=-1,
)
rnn_length = self.context_length + self.prediction_length
else: # during inference
target_in = past_target.slice_axis(
axis=1, begin=-(self.context_length + 1), end=-1
)
# overall observed_values field
# input observed_values corresponding to target_in
observed_values_in = past_observed_values.slice_axis(
axis=1, begin=-(self.context_length + 1), end=-1
)
rnn_length = self.context_length
# compute scale
scale = self.compute_scale(target_in, observed_values_in)
# scale target_in
target_in_scale = F.broadcast_div(target_in, scale)
# compute network output
net_output, states = self.rnn.unroll(
inputs=target_in_scale,
length=rnn_length,
layout="NTC",
merge_outputs=True,
)
return net_output, states, scale
class MyProbTrainRNN(MyProbRNN):
def hybrid_forward(
self,
F,
past_target,
future_target,
past_observed_values,
future_observed_values,
):
net_output, _, scale = self.unroll_encoder(
F, past_target, past_observed_values, future_target, future_observed_values
)
# output target from -(context_length + prediction_length) to end
target_out = F.concat(past_target, future_target, dim=-1).slice_axis(
axis=1, begin=-(self.context_length + self.prediction_length), end=None
)
# project network output to distribution parameters domain
distr_args = self.proj_distr_args(net_output)
# compute distribution
distr = self.distr_output.distribution(distr_args, scale=scale)
# negative log-likelihood
loss = distr.loss(target_out)
return loss
class MyProbPredRNN(MyProbTrainRNN):
def sample_decoder(self, F, past_target, states, scale):
# repeat fields: from (batch_size, past_target_length) to
# (batch_size * num_sample_paths, past_target_length)
repeated_states = [
s.repeat(repeats=self.num_sample_paths, axis=0) for s in states
]
repeated_scale = scale.repeat(repeats=self.num_sample_paths, axis=0)
# first decoder input is the last value of the past_target, i.e.,
# the previous value of the first time step we want to forecast
decoder_input = past_target.slice_axis(axis=1, begin=-1, end=None).repeat(
repeats=self.num_sample_paths, axis=0
)
# list with samples at each time step
future_samples = []
# for each future time step we draw new samples for this time step and update the state
# the drawn samples are the inputs to the rnn at the next time step
for k in range(self.prediction_length):
rnn_outputs, repeated_states = self.rnn.unroll(
inputs=decoder_input,
length=1,
begin_state=repeated_states,
layout="NTC",
merge_outputs=True,
)
# project network output to distribution parameters domain
distr_args = self.proj_distr_args(rnn_outputs)
# compute distribution
distr = self.distr_output.distribution(distr_args, scale=repeated_scale)
# draw samples (batch_size * num_samples, 1)
new_samples = distr.sample()
# append the samples of the current time step
future_samples.append(new_samples)
# update decoder input for the next time step
decoder_input = new_samples
samples = F.concat(*future_samples, dim=1)
# (batch_size, num_samples, prediction_length)
return samples.reshape(
shape=(-1, self.num_sample_paths, self.prediction_length)
)
def hybrid_forward(self, F, past_target, past_observed_values):
# unroll encoder over context_length
net_output, states, scale = self.unroll_encoder(
F, past_target, past_observed_values
)
samples = self.sample_decoder(F, past_target, states, scale)
return samples
[86]:
class MyProbRNNEstimator(GluonEstimator):
@validated()
def __init__(
self,
prediction_length: int,
context_length: int,
distr_output: DistributionOutput,
num_cells: int,
num_layers: int,
num_sample_paths: int = 100,
scaling: bool = True,
batch_size: int = 32,
trainer: Trainer = Trainer(),
) -> None:
super().__init__(trainer=trainer, batch_size=batch_size)
self.prediction_length = prediction_length
self.context_length = context_length
self.distr_output = distr_output
self.num_cells = num_cells
self.num_layers = num_layers
self.num_sample_paths = num_sample_paths
self.scaling = scaling
def create_transformation(self):
# Feature transformation that the model uses for input.
return AddObservedValuesIndicator(
target_field=FieldName.TARGET,
output_field=FieldName.OBSERVED_VALUES,
)
def create_training_data_loader(self, dataset, **kwargs):
instance_splitter = InstanceSplitter(
target_field=FieldName.TARGET,
is_pad_field=FieldName.IS_PAD,
start_field=FieldName.START,
forecast_start_field=FieldName.FORECAST_START,
instance_sampler=ExpectedNumInstanceSampler(
num_instances=1,
min_future=self.prediction_length,
),
past_length=self.context_length + 1,
future_length=self.prediction_length,
time_series_fields=[
FieldName.FEAT_DYNAMIC_REAL,
FieldName.OBSERVED_VALUES,
],
)
input_names = get_hybrid_forward_input_names(MyProbTrainRNN)
return TrainDataLoader(
dataset=dataset,
transform=instance_splitter + SelectFields(input_names),
batch_size=self.batch_size,
stack_fn=partial(batchify, ctx=self.trainer.ctx, dtype=self.dtype),
**kwargs,
)
def create_training_network(self) -> MyProbTrainRNN:
return MyProbTrainRNN(
prediction_length=self.prediction_length,
context_length=self.context_length,
distr_output=self.distr_output,
num_cells=self.num_cells,
num_layers=self.num_layers,
num_sample_paths=self.num_sample_paths,
scaling=self.scaling,
)
def create_predictor(
self, transformation: Transformation, trained_network: HybridBlock
) -> Predictor:
prediction_splitter = InstanceSplitter(
target_field=FieldName.TARGET,
is_pad_field=FieldName.IS_PAD,
start_field=FieldName.START,
forecast_start_field=FieldName.FORECAST_START,
instance_sampler=TestSplitSampler(),
past_length=self.context_length + 1,
future_length=self.prediction_length,
time_series_fields=[
FieldName.FEAT_DYNAMIC_REAL,
FieldName.OBSERVED_VALUES,
],
)
prediction_network = MyProbPredRNN(
prediction_length=self.prediction_length,
context_length=self.context_length,
distr_output=self.distr_output,
num_cells=self.num_cells,
num_layers=self.num_layers,
num_sample_paths=self.num_sample_paths,
scaling=self.scaling,
)
copy_parameters(trained_network, prediction_network)
return RepresentableBlockPredictor(
input_transform=transformation + prediction_splitter,
prediction_net=prediction_network,
batch_size=self.batch_size,
prediction_length=self.prediction_length,
ctx=self.trainer.ctx,
)
[87]:
estimator = MyProbRNNEstimator(
prediction_length=24,
context_length=48,
num_cells=40,
num_layers=2,
distr_output=GaussianOutput(),
trainer=Trainer(
ctx="cpu",
epochs=5,
learning_rate=1e-3,
hybridize=False,
num_batches_per_epoch=100,
),
)
[88]:
predictor = estimator.train(train_ds)
100%|██████████| 100/100 [00:16<00:00, 6.03it/s, epoch=1/5, avg_epoch_loss=0.752]
100%|██████████| 100/100 [00:16<00:00, 6.03it/s, epoch=2/5, avg_epoch_loss=0.394]
100%|██████████| 100/100 [00:16<00:00, 5.88it/s, epoch=3/5, avg_epoch_loss=0.342]
100%|██████████| 100/100 [00:16<00:00, 6.06it/s, epoch=4/5, avg_epoch_loss=0.294]
100%|██████████| 100/100 [00:16<00:00, 5.96it/s, epoch=5/5, avg_epoch_loss=0.268]
[89]:
forecast_it, ts_it = make_evaluation_predictions(
dataset=test_ds, # test dataset
predictor=predictor, # predictor
num_samples=100, # number of sample paths we want for evaluation
)
[90]:
forecasts = list(forecast_it)
tss = list(ts_it)
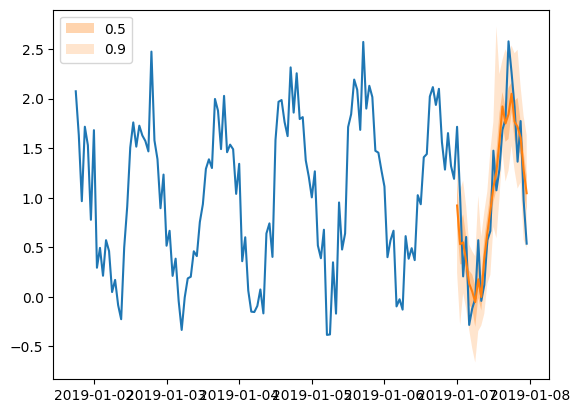
[91]:
plt.plot(tss[0][-150:].to_timestamp())
forecasts[0].plot(show_label=True)
plt.legend()
[91]:
<matplotlib.legend.Legend at 0x7f2498159640>