LayerNorm¶
- class torch.nn.LayerNorm(normalized_shape, eps=1e-05, elementwise_affine=True, bias=True, device=None, dtype=None)[源代码]¶
对输入的小批量数据应用层归一化。
该层实现了论文中描述的操作 Layer Normalization
均值和标准差是基于最后D个维度计算的,其中D是
normalized_shape的维度。例如,如果normalized_shape是(3, 5)(一个二维形状),则均值和标准差是基于输入的最后两个维度计算的(即input.mean((-2, -1)))。 和 是normalized_shape的可学习仿射变换参数,如果elementwise_affine是True。 标准差是通过有偏估计量计算的,等同于torch.var(input, unbiased=False)。注意
与批量归一化和实例归一化不同,批量归一化和实例归一化在每个整个通道/平面应用标量缩放和偏置,使用
affine选项,而层归一化应用逐元素的缩放和偏置,使用elementwise_affine。该层在训练和评估模式下均使用从输入数据计算的统计数据。
- Parameters
normalized_shape (int 或 list 或 torch.Size) –
从预期输入的大小中获取的输入形状
如果使用单个整数,它将被视为单例列表,并且此模块将在预期为该特定大小的最后一个维度上进行归一化。
eps (float) – 为了数值稳定性而添加到分母中的值。默认值:1e-5
elementwise_affine (bool) – 一个布尔值,当设置为
True时,此模块具有可学习的逐元素仿射参数,初始化为1(用于权重)和0(用于偏置)。默认值:True。偏差 (布尔值) – 如果设置为
False,该层将不会学习一个加性偏差(仅在elementwise_affine为True时相关)。默认值:True。
- Variables
权重 – 模块的可学习权重,形状为 当
elementwise_affine设置为True时。 这些值初始化为 1。偏置 – 模块的可学习偏置,形状为 当
elementwise_affine设置为True时。 其值初始化为0。
- Shape:
输入:
输出: (与输入形状相同)
示例:
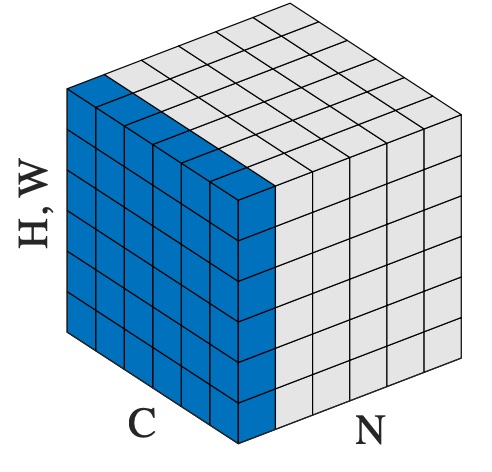
>>> # NLP示例 >>> batch, sentence_length, embedding_dim = 20, 5, 10 >>> embedding = torch.randn(batch, sentence_length, embedding_dim) >>> layer_norm = nn.LayerNorm(embedding_dim) >>> # 激活模块 >>> layer_norm(embedding) >>> >>> # 图像示例 >>> N, C, H, W = 20, 5, 10, 10 >>> input = torch.randn(N, C, H, W) >>> # 在最后三个维度上进行归一化(即通道和空间维度) >>> # 如下图所示 >>> layer_norm = nn.LayerNorm([C, H, W]) >>> output = layer_norm(input)