


广义极值分布#
介绍#
广义极值(GEV)分布是一种包含Weibull、Gumbel和Frechet极值分布族的元分布。它用于建模平稳过程的极值(最大值或最小值)的分布,例如年最大风速、桥梁上年最大卡车重量等,而无需事先决定尾部行为。
遵循Coles [2001]中使用的参数化方法,极值分布(GEV)用于最大值的分布如下:
当:
\(\xi < 0\) 我们得到具有有界上尾的威布尔分布;
\(\xi = 0\),在极限情况下,我们得到Gumbel分布,两端无界;
\(\xi > 0\),我们得到Frechet分布,它在下尾部是有界的。
请注意,形状参数 \(\xi\) 的这种参数化与 SciPy 中使用的符号相反(在 SciPy 中它被表示为 c)。此外,通过研究数据负值的最大值分布,可以很容易地检查最小值的分布。
我们将使用Port Pirie年最高海平面数据的例子,该数据在Coles [2001]中使用,并与那里提出的频率论结果进行比较。
import arviz as az
import matplotlib.pyplot as plt
import numpy as np
import pymc as pm
import pymc_experimental.distributions as pmx
import pytensor.tensor as pt
from arviz.plots import plot_utils as azpu
数据#
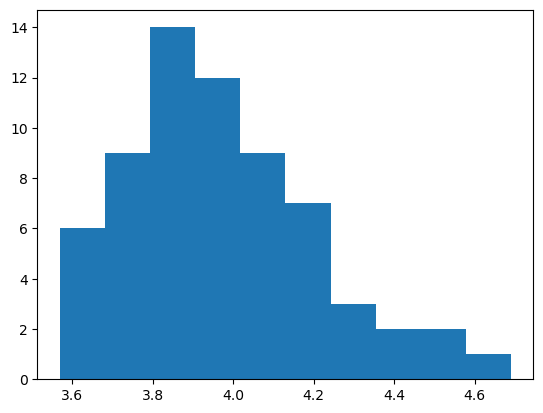
The Port Pirie数据由Coles [2001]提供,并在此重复:
# fmt: off
data = np.array([4.03, 3.83, 3.65, 3.88, 4.01, 4.08, 4.18, 3.80,
4.36, 3.96, 3.98, 4.69, 3.85, 3.96, 3.85, 3.93,
3.75, 3.63, 3.57, 4.25, 3.97, 4.05, 4.24, 4.22,
3.73, 4.37, 4.06, 3.71, 3.96, 4.06, 4.55, 3.79,
3.89, 4.11, 3.85, 3.86, 3.86, 4.21, 4.01, 4.11,
4.24, 3.96, 4.21, 3.74, 3.85, 3.88, 3.66, 4.11,
3.71, 4.18, 3.90, 3.78, 3.91, 3.72, 4.00, 3.66,
3.62, 4.33, 4.55, 3.75, 4.08, 3.90, 3.88, 3.94,
4.33])
# fmt: on
plt.hist(data)
plt.show()
建模与预测#
在我们要进行的建模中,我们希望做两件事:
基于一些相当非信息的先验,对GEV参数进行参数推断,并且;
预测10年回报水平。
在贝叶斯框架下,考虑参数不确定性的极值预测很容易实现。有趣的是,将这种便利性与Caprani 和 OBrien [2010]在频率主义框架下进行此操作时遇到的困难进行比较。无论如何,在超过概率\(p\)下的预测值由以下公式给出:
这是参数值的确定性函数,因此在模型上下文中使用pm.Deterministic来实现。
考虑10年回报期,其中 \(p = 1/10\):
p = 1 / 10
现在使用从上述直方图的快速回顾中估计的先验设置模型:
\(\mu\): 除了标准差限制负结果的
正态分布外,没有真正的依据考虑其他任何分布;\(\sigma\): 这必须是正数,并且值很小,因此使用
HalfNormal并设置单位标准差;\(\xi\): 我们对尾部行为持不可知态度,因此将其中心设为零,但限制在物理上合理的范围内\(\pm 0.6\),并使其在零附近保持一定程度的紧密性。
# Optionally centre the data, depending on fitting and divergences
# cdata = (data - data.mean())/data.std()
with pm.Model() as model:
# Priors
μ = pm.Normal("μ", mu=3.8, sigma=0.2)
σ = pm.HalfNormal("σ", sigma=0.3)
ξ = pm.TruncatedNormal("ξ", mu=0, sigma=0.2, lower=-0.6, upper=0.6)
# Estimation
gev = pmx.GenExtreme("gev", mu=μ, sigma=σ, xi=ξ, observed=data)
# Return level
z_p = pm.Deterministic("z_p", μ - σ / ξ * (1 - (-np.log(1 - p)) ** (-ξ)))
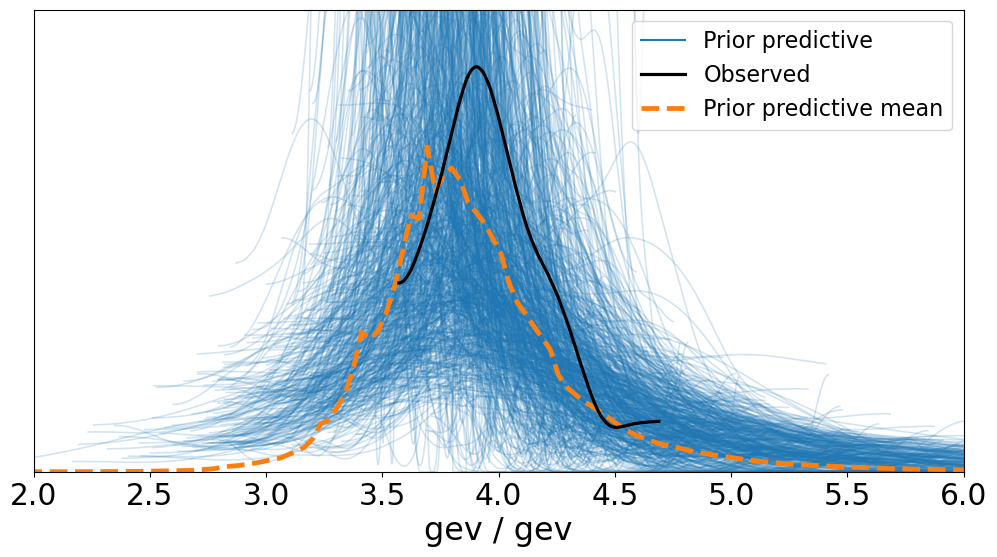
先验预测检查#
让我们感受一下我们选择的先验分布是否能覆盖数据的范围:
idata = pm.sample_prior_predictive(samples=1000, model=model)
az.plot_ppc(idata, group="prior", figsize=(12, 6))
ax = plt.gca()
ax.set_xlim([2, 6])
ax.set_ylim([0, 2]);
Sampling: [gev, μ, ξ, σ]
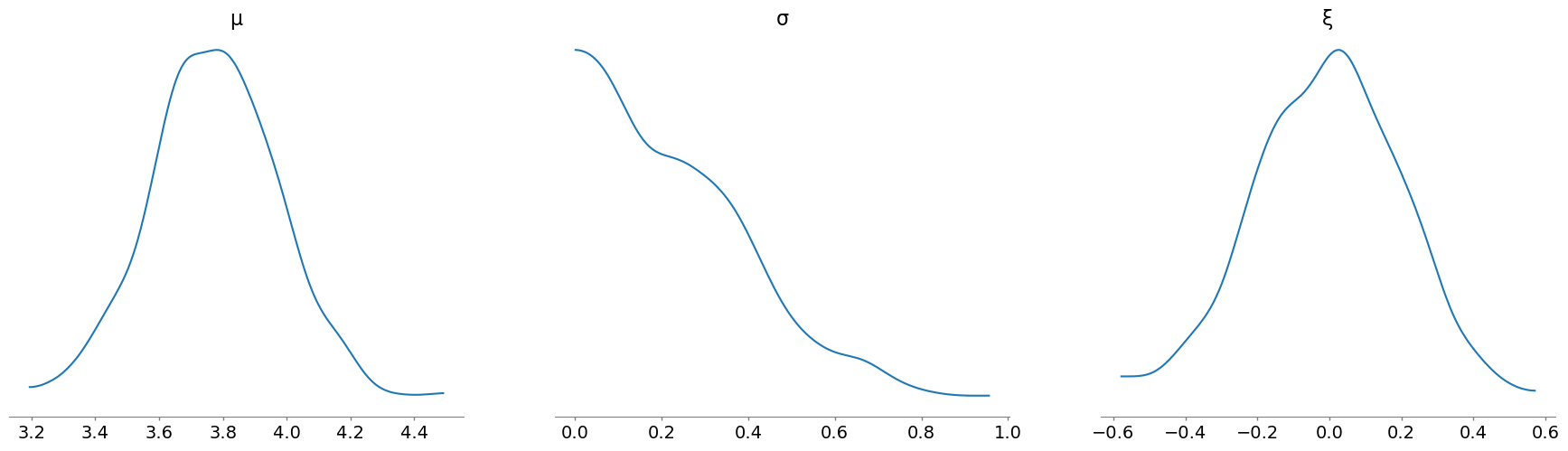
我们可以使用 plot_posterior 函数查看参数的采样值,但需要传入 idata 对象并指定 group 为 "prior":
az.plot_posterior(
idata, group="prior", var_names=["μ", "σ", "ξ"], hdi_prob="hide", point_estimate=None
);
推理#
按下神奇的推理按钮\(^{\mathrm{TM}}\):
with model:
trace = pm.sample(
5000,
cores=4,
chains=4,
tune=2000,
initvals={"μ": -0.5, "σ": 1.0, "ξ": -0.1},
target_accept=0.98,
)
# add trace to existing idata object
idata.extend(trace)
Auto-assigning NUTS sampler...
Initializing NUTS using jitter+adapt_diag...
Multiprocess sampling (4 chains in 4 jobs)
NUTS: [μ, σ, ξ]
Sampling 4 chains for 2_000 tune and 5_000 draw iterations (8_000 + 20_000 draws total) took 16 seconds.
There were 2 divergences after tuning. Increase `target_accept` or reparameterize.
There were 2 divergences after tuning. Increase `target_accept` or reparameterize.
There was 1 divergence after tuning. Increase `target_accept` or reparameterize.
az.plot_trace(idata, var_names=["μ", "σ", "ξ"], figsize=(12, 12));
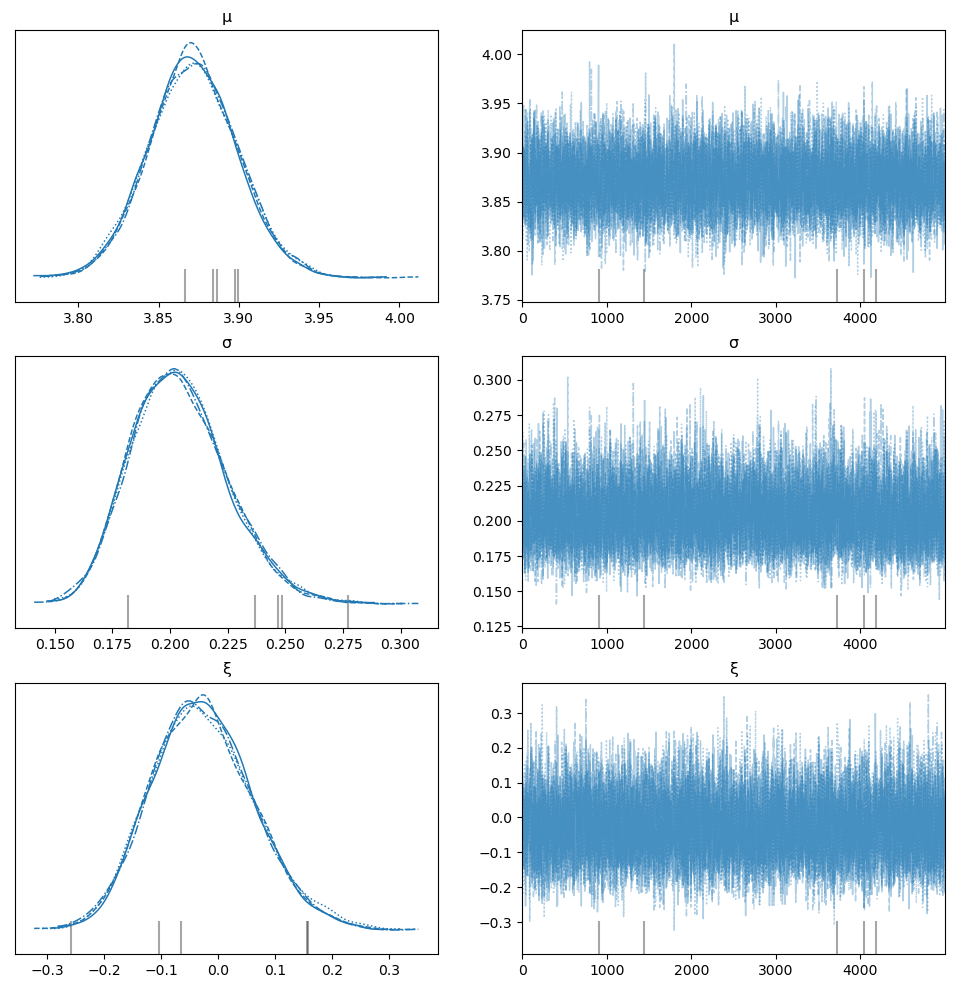
分歧#
轨迹表现出分歧(通常情况下)。当参数的支持边界被接近时,HMC/NUTS采样器可能会出现问题。由于GEV的边界随着\(\xi\)的符号变化,因此很难提供一个解决此问题的变换。一种可能的变换——Box-Cox变换——由Bali [2003]提出,但Caprani和OBrien [2010]发现它在数值上不稳定,即使仅用于最大似然估计。无论如何,缓解分歧问题的建议是:
增加目标接受率;
使用更多信息丰富的先验,特别是将形状参数限制在物理上合理的值范围内,通常 \(\xi \in [-0.5,0.5]\);
确定尾部的吸引域(即Weibull、Gumbel或Frechet),并直接使用该分布。
推断#
参数估计的95%可信区间范围是:
az.hdi(idata, hdi_prob=0.95)
<xarray.Dataset>
Dimensions: (hdi: 2)
Coordinates:
* hdi (hdi) <U6 'lower' 'higher'
Data variables:
μ (hdi) float64 3.817 3.926
σ (hdi) float64 0.1668 0.2473
ξ (hdi) float64 -0.1989 0.1506
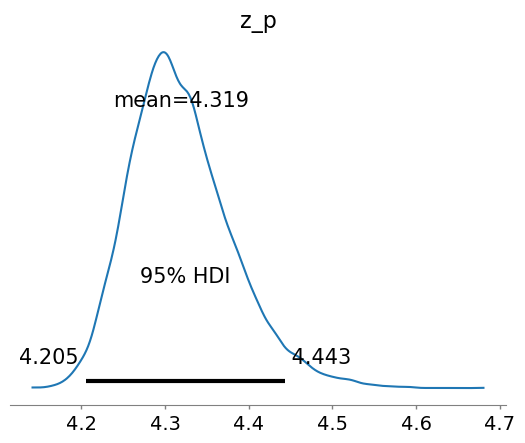
z_p (hdi) float64 4.205 4.443并检查预测分布,考虑参数的可变性(且无需假设正态性):
az.plot_posterior(idata, hdi_prob=0.95, var_names=["z_p"], round_to=4);
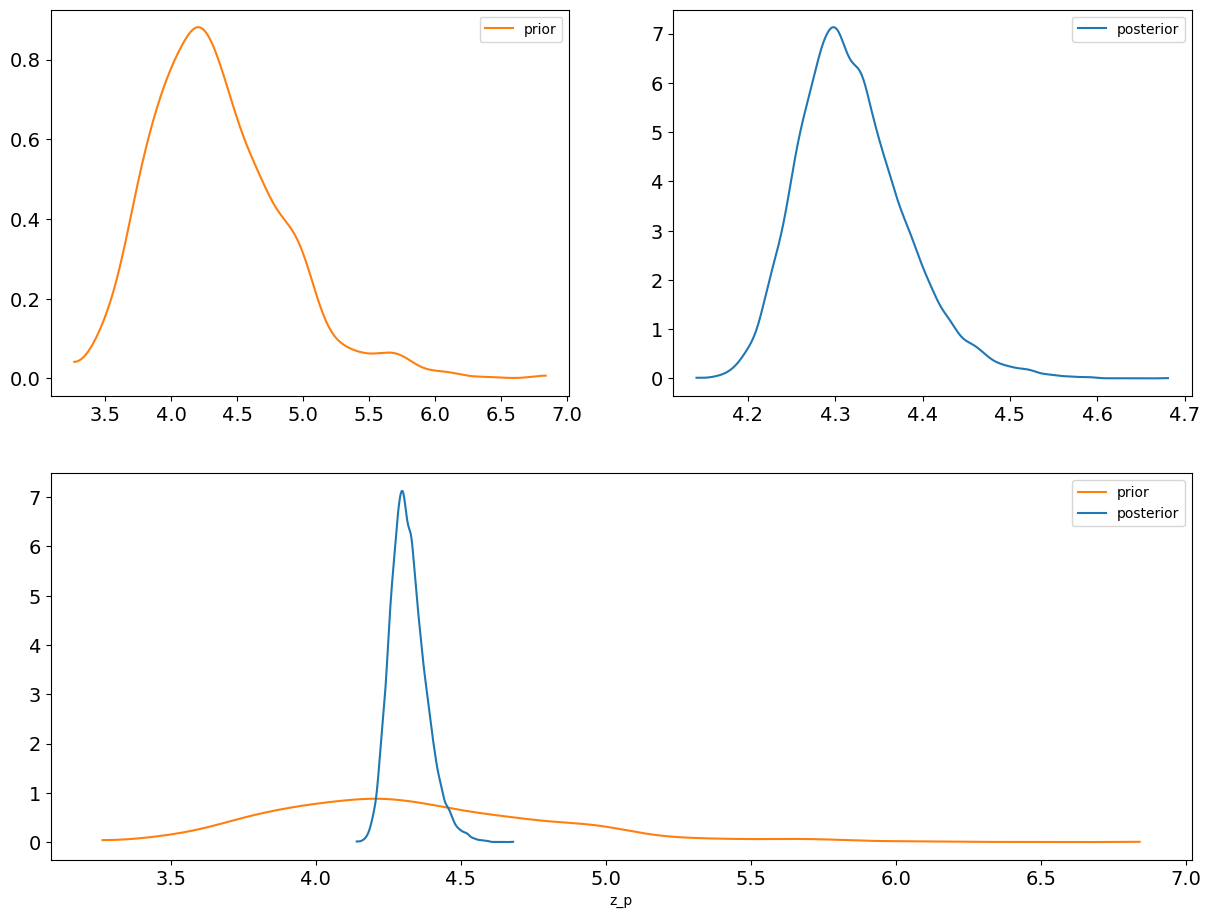
让我们比较先验和后验对 \(z_p\) 的预测,看看数据是如何影响这些预测的:
az.plot_dist_comparison(idata, var_names=["z_p"]);
比较#
为了与Coles [2001]给出的结果进行比较,我们使用后验分布的模式(即最大后验或MAP估计)来近似最大似然估计(MLE)。当先验在后验估计附近合理平坦时,这些估计值接近。
在Coles [2001]中给出的最大似然估计结果是:
估计的方差-协方差矩阵为:
请注意,从我们的推理中提取最大似然估计(MLE)需要访问一些Arviz后端函数,以便将xarray转换为可检查的形式:
_, vals = az.sel_utils.xarray_to_ndarray(idata["posterior"], var_names=["μ", "σ", "ξ"])
mle = [azpu.calculate_point_estimate("mode", val) for val in vals]
mle
[3.87076953741271, 0.20235860610945772, -0.03389174278155249]
idata["posterior"].drop_vars("z_p").to_dataframe().cov().round(6)
| μ | σ | ξ | |
|---|---|---|---|
| μ | 0.000771 | 0.000174 | -0.000797 |
| σ | 0.000174 | 0.000436 | -0.000562 |
| ξ | -0.000797 | -0.000562 | 0.008051 |
结果非常吻合,但在贝叶斯框架下进行这一操作的好处是,我们可以免费获得参数和回报水平的完整后验联合分布。相比之下,在Coles [2001]中,即使是为了获得方差-协方差矩阵,也需要做出宽松的正态性假设并付出大量的计算努力。
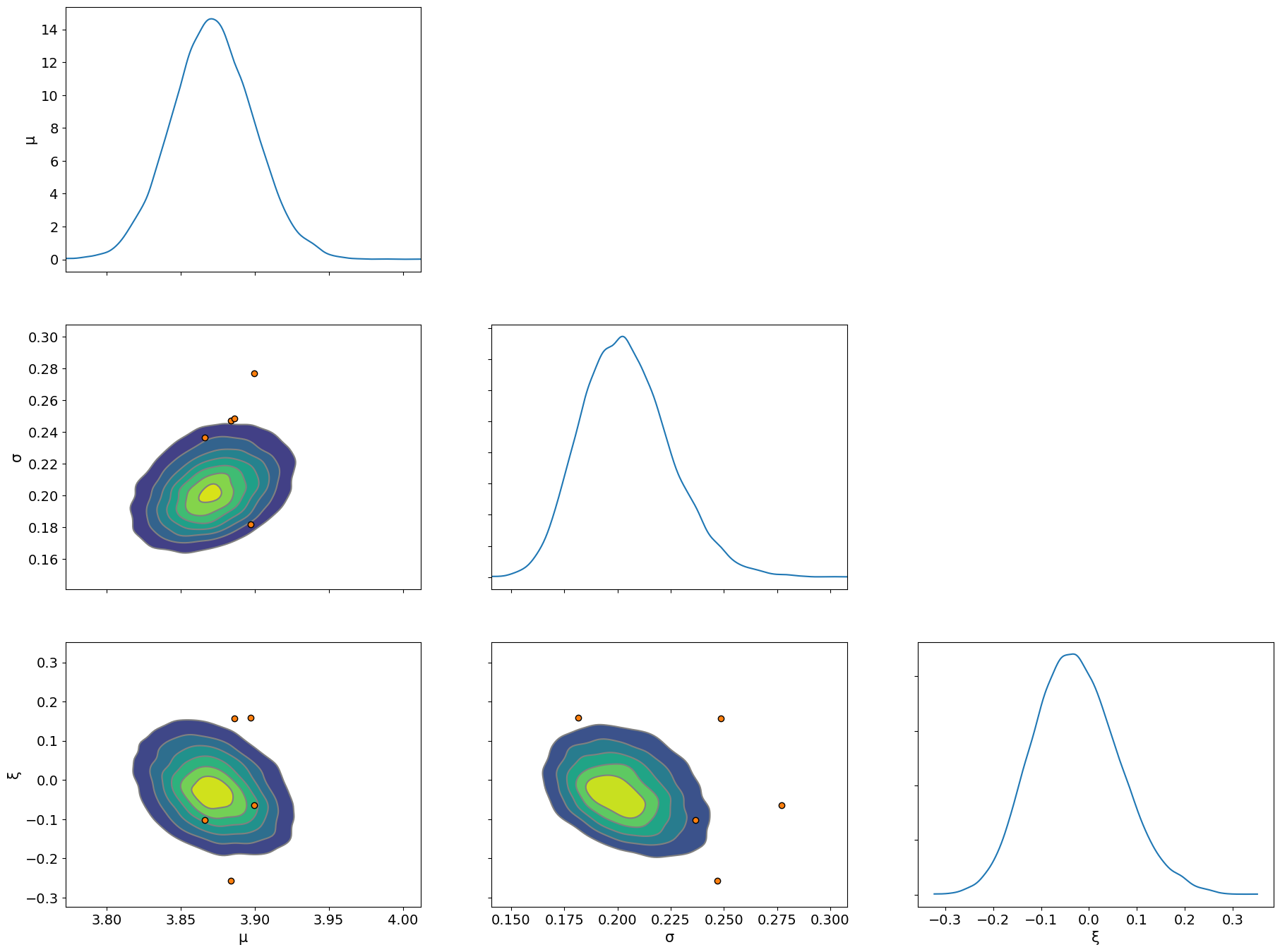
最后,我们检查配对图,并使用散度查看推断中存在的任何困难
az.plot_pair(idata, var_names=["μ", "σ", "ξ"], kind="kde", marginals=True, divergences=True);
参考资料#
斯图尔特·科尔斯。极值统计建模导论。统计学中的斯普林格系列。斯普林格,伦敦,英格兰,2001年8月,2001年版。ISBN 978-1-85233-459-8。URL: https://doi.org/10.1007/978-1-4471-3675-0.
Colin C. Caprani 和 Eugene J. OBrien。使用预测似然法估计极端桥梁交通荷载效应的分布。结构安全,32(2):138–144, 2010。URL: https://www.sciencedirect.com/science/article/pii/S016747300900071X, doi:https://doi.org/10.1016/j.strusafe.2009.09.001.
Turan G. Bali. 广义极值分布。经济学快报,79(3):423–427, 2003. URL: https://www.sciencedirect.com/science/article/pii/S0165176503000351, doi:https://doi.org/10.1016/S0165-1765(03)00035-1.
Colin C. Caprani 和 Eugene J. OBrien. 估计极端公路桥梁交通荷载效应。在 Hitoshi Furuta、Dan M Frangopol 和 Masanobu Shinozuka 编辑的 第十届国际结构安全与可靠性会议 (ICOSSAR2009) 论文集 中,1 – 8. CRC Press, 2010. URL: https://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.722.6789&rep=rep1&type=pdf.
水印#
%load_ext watermark
%watermark -n -u -v -iv -w -p pytensor,arviz
Last updated: Tue Sep 27 2022
Python implementation: CPython
Python version : 3.10.6
IPython version : 8.5.0
pytensor: 2.8.6
arviz : 0.12.1
pymc_experimental: 0.0.1
sys : 3.10.6 | packaged by conda-forge | (main, Aug 22 2022, 20:36:39) [GCC 10.4.0]
matplotlib : 3.6.0
arviz : 0.12.1
numpy : 1.23.3
json : 2.0.9
pytensor : 2.8.6
pymc : 3.9.3+1493.g372d7c24
Watermark: 2.3.1