DoWhy: 因果推断的不同估计方法#
这是对DoWhy因果推断库的快速介绍。我们将加载一个样本数据集,并使用不同的方法来估计(预先指定的)处理变量对(预先指定的)结果变量的因果效应。
我们将看到,并非所有的估计器都能为这个数据集返回正确的效果。
首先,让我们添加Python所需的路径以找到DoWhy代码并加载所有必需的包
[1]:
%load_ext autoreload
%autoreload 2
[2]:
import numpy as np
import pandas as pd
import logging
import dowhy
from dowhy import CausalModel
import dowhy.datasets
现在,让我们加载一个数据集。为了简单起见,我们模拟了一个数据集,其中常见原因与治疗之间以及常见原因与结果之间存在线性关系。
Beta 是真实的因果效应。
[3]:
data = dowhy.datasets.linear_dataset(beta=10,
num_common_causes=5,
num_instruments = 2,
num_treatments=1,
num_samples=10000,
treatment_is_binary=True,
outcome_is_binary=False,
stddev_treatment_noise=10)
df = data["df"]
df
[3]:
| Z0 | Z1 | W0 | W1 | W2 | W3 | W4 | v0 | y | |
|---|---|---|---|---|---|---|---|---|---|
| 0 | 1.0 | 0.479477 | 0.477095 | 1.132642 | 0.108390 | 0.382815 | 0.532607 | True | 14.968331 |
| 1 | 1.0 | 0.989410 | 0.915693 | -1.342175 | 0.670553 | 1.005776 | 0.332877 | True | 19.876419 |
| 2 | 1.0 | 0.820212 | -0.413122 | -2.197523 | 0.294065 | 0.852834 | 0.115160 | True | 13.483019 |
| 3 | 1.0 | 0.954148 | 0.035852 | -1.827038 | 0.424961 | -0.527072 | -0.605727 | True | 7.464827 |
| 4 | 1.0 | 0.203695 | 2.714909 | 0.470942 | -0.773594 | 0.723341 | -1.306709 | True | 14.276015 |
| ... | ... | ... | ... | ... | ... | ... | ... | ... | ... |
| 9995 | 1.0 | 0.611374 | 0.098375 | -0.625154 | 2.163267 | -0.021415 | -0.974123 | True | 18.078720 |
| 9996 | 1.0 | 0.823602 | -0.369129 | 0.792496 | 0.019248 | -0.193196 | 0.128058 | True | 8.958994 |
| 9997 | 1.0 | 0.893659 | -0.266886 | 1.225691 | -0.968349 | -0.255394 | -1.084577 | True | 2.566665 |
| 9998 | 1.0 | 0.835925 | 1.396273 | -1.301292 | -0.656232 | -0.634653 | 0.869848 | True | 7.887862 |
| 9999 | 1.0 | 0.776103 | -0.582994 | -0.607181 | 1.849334 | 1.112603 | -2.315254 | True | 18.291335 |
10000 行 × 9 列
请注意,我们正在使用pandas数据框来加载数据。
识别因果估计量#
我们现在以DOT图形格式输入一个因果图。
[4]:
# With graph
model=CausalModel(
data = df,
treatment=data["treatment_name"],
outcome=data["outcome_name"],
graph=data["gml_graph"],
instruments=data["instrument_names"]
)
[5]:
model.view_model()
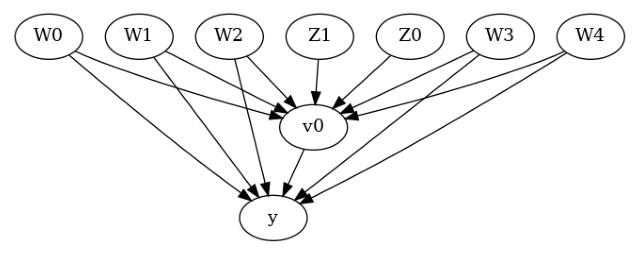
[6]:
from IPython.display import Image, display
display(Image(filename="causal_model.png"))
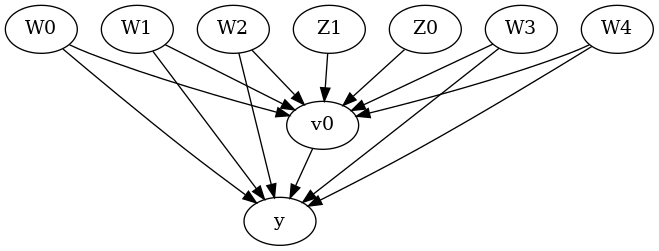
我们得到了一个因果图。现在识别和估计已经完成。
[7]:
identified_estimand = model.identify_effect(proceed_when_unidentifiable=True)
print(identified_estimand)
Estimand type: EstimandType.NONPARAMETRIC_ATE
### Estimand : 1
Estimand name: backdoor
Estimand expression:
d
─────(E[y|W3,W0,W4,W2,W1])
d[v₀]
Estimand assumption 1, Unconfoundedness: If U→{v0} and U→y then P(y|v0,W3,W0,W4,W2,W1,U) = P(y|v0,W3,W0,W4,W2,W1)
### Estimand : 2
Estimand name: iv
Estimand expression:
⎡ -1⎤
⎢ d ⎛ d ⎞ ⎥
E⎢─────────(y)⋅⎜─────────([v₀])⎟ ⎥
⎣d[Z₀ Z₁] ⎝d[Z₀ Z₁] ⎠ ⎦
Estimand assumption 1, As-if-random: If U→→y then ¬(U →→{Z0,Z1})
Estimand assumption 2, Exclusion: If we remove {Z0,Z1}→{v0}, then ¬({Z0,Z1}→y)
### Estimand : 3
Estimand name: frontdoor
No such variable(s) found!
方法1:回归#
使用线性回归。
[8]:
causal_estimate_reg = model.estimate_effect(identified_estimand,
method_name="backdoor.linear_regression",
test_significance=True)
print(causal_estimate_reg)
print("Causal Estimate is " + str(causal_estimate_reg.value))
*** Causal Estimate ***
## Identified estimand
Estimand type: EstimandType.NONPARAMETRIC_ATE
### Estimand : 1
Estimand name: backdoor
Estimand expression:
d
─────(E[y|W3,W0,W4,W2,W1])
d[v₀]
Estimand assumption 1, Unconfoundedness: If U→{v0} and U→y then P(y|v0,W3,W0,W4,W2,W1,U) = P(y|v0,W3,W0,W4,W2,W1)
## Realized estimand
b: y~v0+W3+W0+W4+W2+W1
Target units: ate
## Estimate
Mean value: 9.999731332644417
p-value: [0.]
Causal Estimate is 9.999731332644417
方法2:距离匹配#
定义一个距离度量,然后使用该度量来匹配处理组和对照组之间的最近点。
[9]:
causal_estimate_dmatch = model.estimate_effect(identified_estimand,
method_name="backdoor.distance_matching",
target_units="att",
method_params={'distance_metric':"minkowski", 'p':2})
print(causal_estimate_dmatch)
print("Causal Estimate is " + str(causal_estimate_dmatch.value))
*** Causal Estimate ***
## Identified estimand
Estimand type: EstimandType.NONPARAMETRIC_ATE
### Estimand : 1
Estimand name: backdoor
Estimand expression:
d
─────(E[y|W3,W0,W4,W2,W1])
d[v₀]
Estimand assumption 1, Unconfoundedness: If U→{v0} and U→y then P(y|v0,W3,W0,W4,W2,W1,U) = P(y|v0,W3,W0,W4,W2,W1)
## Realized estimand
b: y~v0+W3+W0+W4+W2+W1
Target units: att
## Estimate
Mean value: 11.278546846122476
Causal Estimate is 11.278546846122476
方法3:倾向评分分层#
我们将使用倾向得分来对数据中的单位进行分层。
[10]:
causal_estimate_strat = model.estimate_effect(identified_estimand,
method_name="backdoor.propensity_score_stratification",
target_units="att")
print(causal_estimate_strat)
print("Causal Estimate is " + str(causal_estimate_strat.value))
*** Causal Estimate ***
## Identified estimand
Estimand type: EstimandType.NONPARAMETRIC_ATE
### Estimand : 1
Estimand name: backdoor
Estimand expression:
d
─────(E[y|W3,W0,W4,W2,W1])
d[v₀]
Estimand assumption 1, Unconfoundedness: If U→{v0} and U→y then P(y|v0,W3,W0,W4,W2,W1,U) = P(y|v0,W3,W0,W4,W2,W1)
## Realized estimand
b: y~v0+W3+W0+W4+W2+W1
Target units: att
## Estimate
Mean value: 9.932208243866834
Causal Estimate is 9.932208243866834
方法4:倾向评分匹配#
我们将使用倾向得分来匹配数据中的单位。
[11]:
causal_estimate_match = model.estimate_effect(identified_estimand,
method_name="backdoor.propensity_score_matching",
target_units="atc")
print(causal_estimate_match)
print("Causal Estimate is " + str(causal_estimate_match.value))
*** Causal Estimate ***
## Identified estimand
Estimand type: EstimandType.NONPARAMETRIC_ATE
### Estimand : 1
Estimand name: backdoor
Estimand expression:
d
─────(E[y|W3,W0,W4,W2,W1])
d[v₀]
Estimand assumption 1, Unconfoundedness: If U→{v0} and U→y then P(y|v0,W3,W0,W4,W2,W1,U) = P(y|v0,W3,W0,W4,W2,W1)
## Realized estimand
b: y~v0+W3+W0+W4+W2+W1
Target units: atc
## Estimate
Mean value: 9.643378784620955
Causal Estimate is 9.643378784620955
方法5:加权#
我们将使用(逆)倾向评分来为数据中的单位分配权重。DoWhy支持几种不同的加权方案:1. 普通逆倾向评分加权(IPS)(weighting_scheme="ips_weight")2. 自归一化IPS加权(也称为Hajek估计器)(weighting_scheme="ips_normalized_weight")3. 稳定化IPS加权(weighting_scheme="ips_stabilized_weight")
[12]:
causal_estimate_ipw = model.estimate_effect(identified_estimand,
method_name="backdoor.propensity_score_weighting",
target_units = "ate",
method_params={"weighting_scheme":"ips_weight"})
print(causal_estimate_ipw)
print("Causal Estimate is " + str(causal_estimate_ipw.value))
*** Causal Estimate ***
## Identified estimand
Estimand type: EstimandType.NONPARAMETRIC_ATE
### Estimand : 1
Estimand name: backdoor
Estimand expression:
d
─────(E[y|W3,W0,W4,W2,W1])
d[v₀]
Estimand assumption 1, Unconfoundedness: If U→{v0} and U→y then P(y|v0,W3,W0,W4,W2,W1,U) = P(y|v0,W3,W0,W4,W2,W1)
## Realized estimand
b: y~v0+W3+W0+W4+W2+W1
Target units: ate
## Estimate
Mean value: 12.478466888961442
Causal Estimate is 12.478466888961442
方法6:工具变量#
我们将使用Wald估计器来处理提供的工具变量。
[13]:
causal_estimate_iv = model.estimate_effect(identified_estimand,
method_name="iv.instrumental_variable", method_params = {'iv_instrument_name': 'Z0'})
print(causal_estimate_iv)
print("Causal Estimate is " + str(causal_estimate_iv.value))
*** Causal Estimate ***
## Identified estimand
Estimand type: EstimandType.NONPARAMETRIC_ATE
### Estimand : 1
Estimand name: iv
Estimand expression:
⎡ -1⎤
⎢ d ⎛ d ⎞ ⎥
E⎢─────────(y)⋅⎜─────────([v₀])⎟ ⎥
⎣d[Z₀ Z₁] ⎝d[Z₀ Z₁] ⎠ ⎦
Estimand assumption 1, As-if-random: If U→→y then ¬(U →→{Z0,Z1})
Estimand assumption 2, Exclusion: If we remove {Z0,Z1}→{v0}, then ¬({Z0,Z1}→y)
## Realized estimand
Realized estimand: Wald Estimator
Realized estimand type: EstimandType.NONPARAMETRIC_ATE
Estimand expression:
⎡ d ⎤
E⎢───(y)⎥
⎣dZ₀ ⎦
──────────
⎡ d ⎤
E⎢───(v₀)⎥
⎣dZ₀ ⎦
Estimand assumption 1, As-if-random: If U→→y then ¬(U →→{Z0,Z1})
Estimand assumption 2, Exclusion: If we remove {Z0,Z1}→{v0}, then ¬({Z0,Z1}→y)
Estimand assumption 3, treatment_effect_homogeneity: Each unit's treatment ['v0'] is affected in the same way by common causes of ['v0'] and ['y']
Estimand assumption 4, outcome_effect_homogeneity: Each unit's outcome ['y'] is affected in the same way by common causes of ['v0'] and ['y']
Target units: ate
## Estimate
Mean value: 7.667844609940294
Causal Estimate is 7.667844609940294
方法7:回归不连续性#
我们将在内部将其转换为一个等效的工具变量问题。
[14]:
causal_estimate_regdist = model.estimate_effect(identified_estimand,
method_name="iv.regression_discontinuity",
method_params={'rd_variable_name':'Z1',
'rd_threshold_value':0.5,
'rd_bandwidth': 0.15})
print(causal_estimate_regdist)
print("Causal Estimate is " + str(causal_estimate_regdist.value))
*** Causal Estimate ***
## Identified estimand
Estimand type: EstimandType.NONPARAMETRIC_ATE
### Estimand : 1
Estimand name: iv
Estimand expression:
⎡ -1⎤
⎢ d ⎛ d ⎞ ⎥
E⎢─────────(y)⋅⎜─────────([v₀])⎟ ⎥
⎣d[Z₀ Z₁] ⎝d[Z₀ Z₁] ⎠ ⎦
Estimand assumption 1, As-if-random: If U→→y then ¬(U →→{Z0,Z1})
Estimand assumption 2, Exclusion: If we remove {Z0,Z1}→{v0}, then ¬({Z0,Z1}→y)
## Realized estimand
Realized estimand: Wald Estimator
Realized estimand type: EstimandType.NONPARAMETRIC_ATE
Estimand expression:
⎡ d ⎤
E⎢──────────────────(y)⎥
⎣dlocal_rd_variable ⎦
─────────────────────────
⎡ d ⎤
E⎢──────────────────(v₀)⎥
⎣dlocal_rd_variable ⎦
Estimand assumption 1, As-if-random: If U→→y then ¬(U →→{Z0,Z1})
Estimand assumption 2, Exclusion: If we remove {Z0,Z1}→{v0}, then ¬({Z0,Z1}→y)
Estimand assumption 3, treatment_effect_homogeneity: Each unit's treatment ['v0'] is affected in the same way by common causes of ['v0'] and ['y']
Estimand assumption 4, outcome_effect_homogeneity: Each unit's outcome ['y'] is affected in the same way by common causes of ['v0'] and ['y']
Target units: ate
## Estimate
Mean value: 4.226754677196832
Causal Estimate is 4.226754677196832